

Hip joint assembly of simulation intelligent robot
An intelligent robot and hip joint technology, applied in the field of robotics, can solve the problems of large volume, low simulation degree and complex structure of the hip joint, and achieve the effects of compact and simple structure, high simulation degree and light weight
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
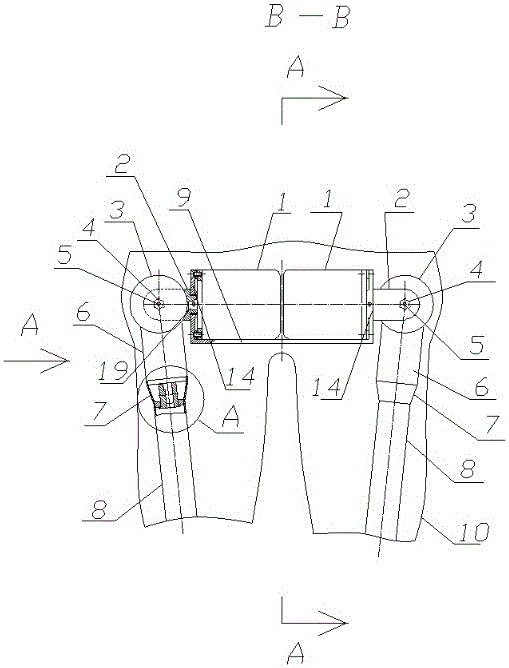
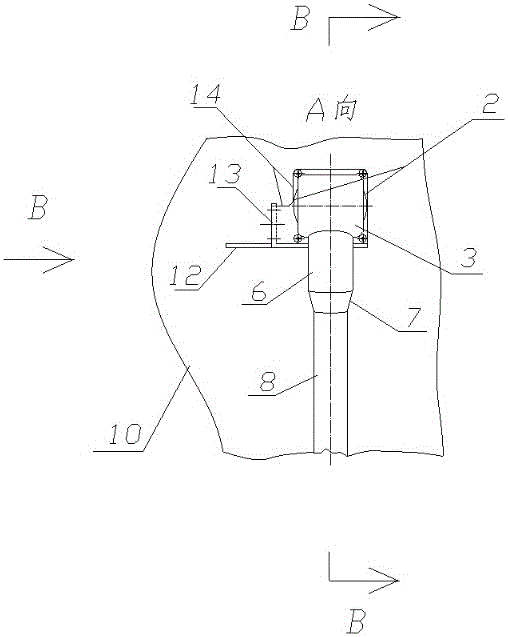
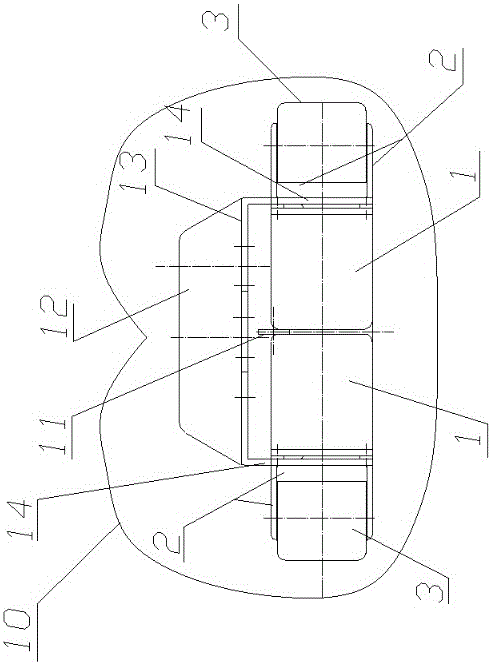
[0018] It can be clearly seen from the figures of the specific embodiments that the present invention includes a hip joint base frame 9, a thigh front and rear swing motor 1 positioned on the left and right side panels 14 in the hip joint base frame 9, and a thigh swing motor 1 positioned on the front and rear swings of the two thighs. The rotating fork 2 on the motor output shaft 19, the two left and right thigh swing motors 3 and the thigh rotating motor 6 are motors with an integrated structure, and the two left and right thigh swing motors 3 and the thigh rotating motor 6 are integrated structure motors. The central output shaft 4 at both ends of the motor is positioned on the rotary fork 2, and is respectively positioned on the output shaft 19 of the two thigh front and rear swing motors 1 through the rotary fork 2. The left and right thigh swing rotation integrated structure motor has a shell of Integrated structure, the output shaft 4 of the left and right thigh swing mo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More