

Shoulder joint assembly of simulation intelligent robot
An intelligent robot and shoulder joint technology, applied in the field of robotics, can solve the problems of low simulation degree, large shoulder joint volume, complex structure, etc., and achieve the effect of high simulation degree, light weight, and compact structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
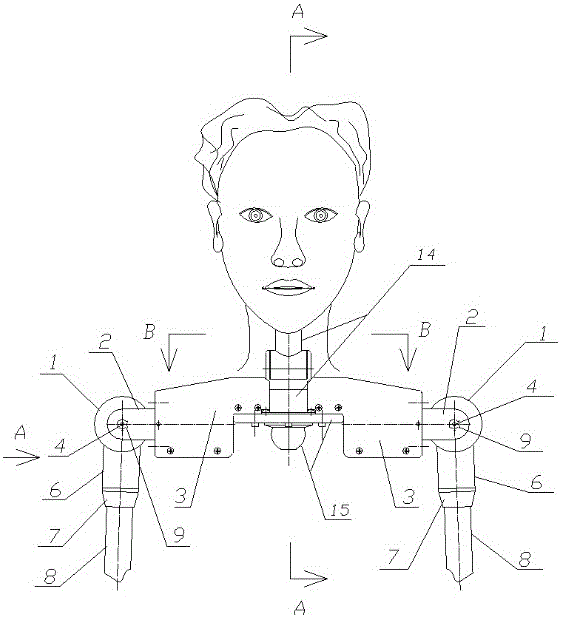
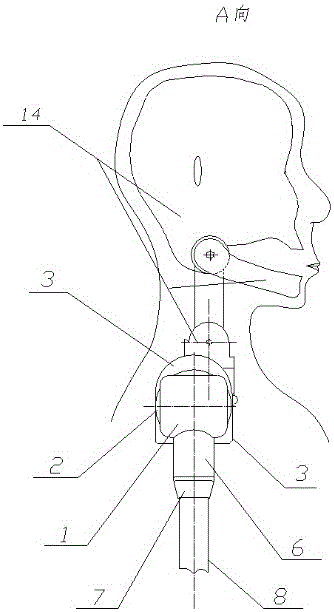
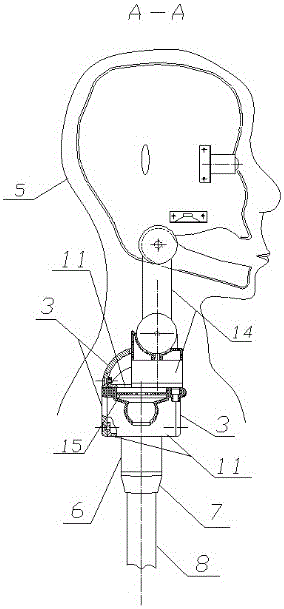
[0018] It can be clearly seen from the figures of the specific embodiments that the present invention includes a shoulder board 3, a front and rear swing motor support plate 11 positioned on the left and right sides in the shoulder board 3, Two front and rear swing motors 10, two arm left and right swing and rotation integrated structure motors, the two arms left and right swing and rotation integrated structure motors are positioned on the front and rear swing arm forks 2 through the output shafts 9 at both ends of the left and right swing motor 1, And through the front and rear swing arm forks 2 respectively positioned on the output shafts of two front and rear swing motors 10 on the left and right sides in the shoulder backboard 3, the center of the left and right swing motor output shafts 9 is provided with a lead hole 4, and the left and right swings of the arms are integrated The control lines of the structural motor all enter through the lead hole 4, and the arm swings l...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More