

A Locating Method for Moving Objects Based on Landmarks
A technology of moving objects and positioning methods, which is applied in navigation, instrumentation, surveying and navigation, etc., can solve the problems of inaccurate and fast positioning, and achieve the effects of fast calculation, strong environmental adaptability, and elimination of positioning failures
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
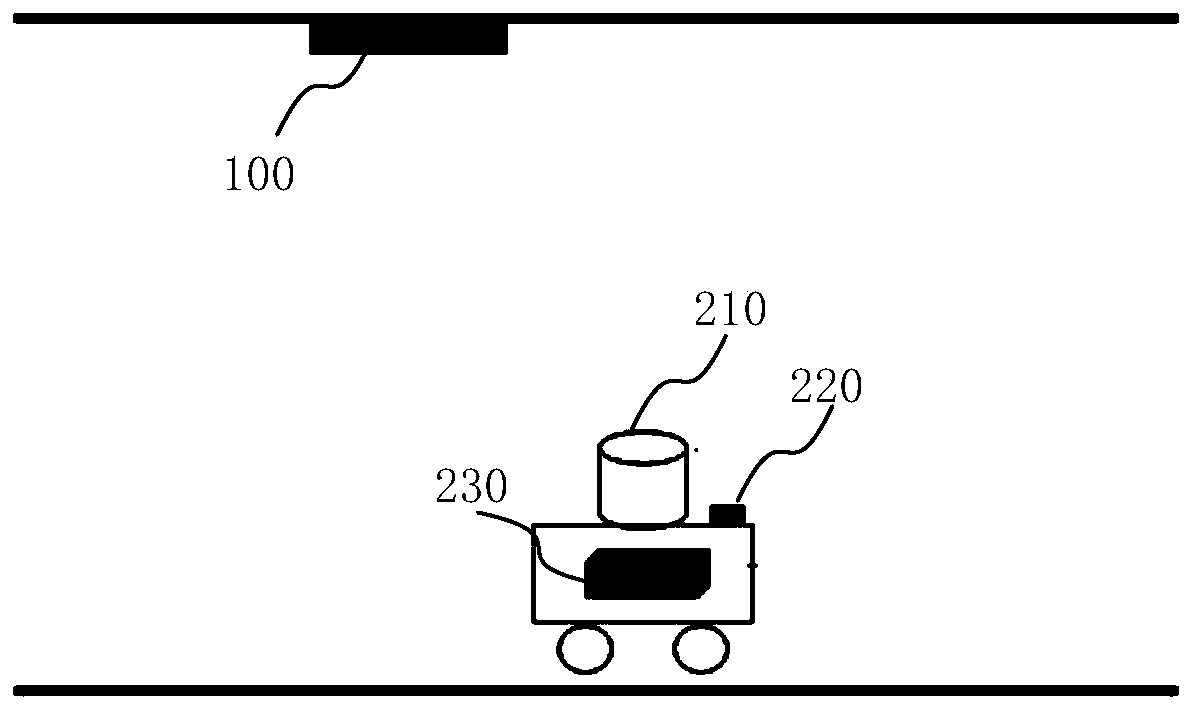
[0036] This embodiment discloses a landmark-based positioning method for a moving object, which adopts manual landmark positioning. The moving object is movable in the indoor environment, and the working state of the moving object is as follows: figure 1 As shown, the road sign 100 is set on the ceiling of the working environment; the moving object is set with a camera 210 , an inclination detection unit 220 and an analysis and positioning unit 230 . The camera 210 is arranged on the top of the moving object, and is used to capture the image of the road sign 100 located on the top of the moving object; the inclination detection unit 220 adopts an inclination sensor, which is used to detect the inclination of the camera 210 relative to the world coordinates; the positioning analysis unit 230 is configured on the mobile The inside of the object is used for analyzing, calculating and locating the world coordinate value of the position of the moving object according to the data co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More