

Complete autonomous super remote distance flight system for unmanned plane, and control method thereof
A technology of ultra-long-distance and control methods, which is applied in the field of UAV fully autonomous ultra-long-distance flight system and control, which can solve the problems that UAVs cannot achieve ultra-long-distance flight operations, and achieve the effect of high control accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
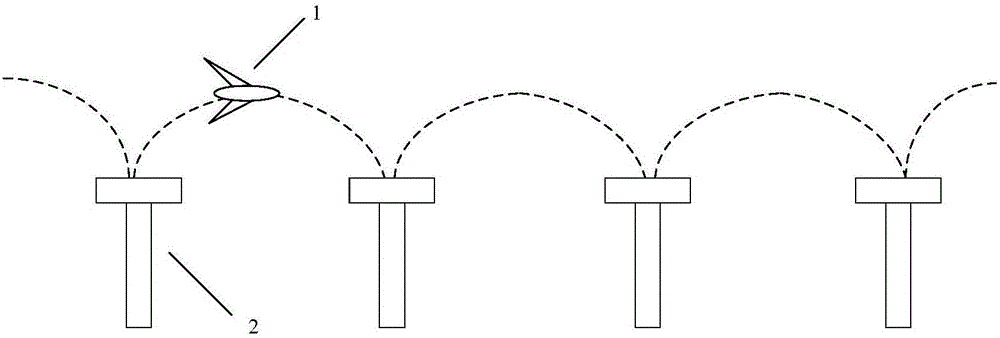
[0037] Such as figure 1 As shown, a UAV fully autonomous ultra-long-distance flight system includes a UAV 1 and four charging base stations 2; the UAV 1 includes a battery, a flight control system, a camera, a power detection module, and a first positioning module and the first communication module, the flight control system is electrically connected with the camera, the first positioning module, the battery power detection module, and the first communication module, and the battery supplies power for the drone; the four charging base stations 2 are connected along the drone Set the flight lines at equal intervals, and the distance between adjacent base stations is 30km; each charging base station includes a bracket and a drone landing platform set on the bracket, a battery replacement mechanism, a control device, a GPS positioning module, and a second communication modules and solar charging modules, the landing platform is provided with identifiable patterns; the battery rep...
Embodiment 2
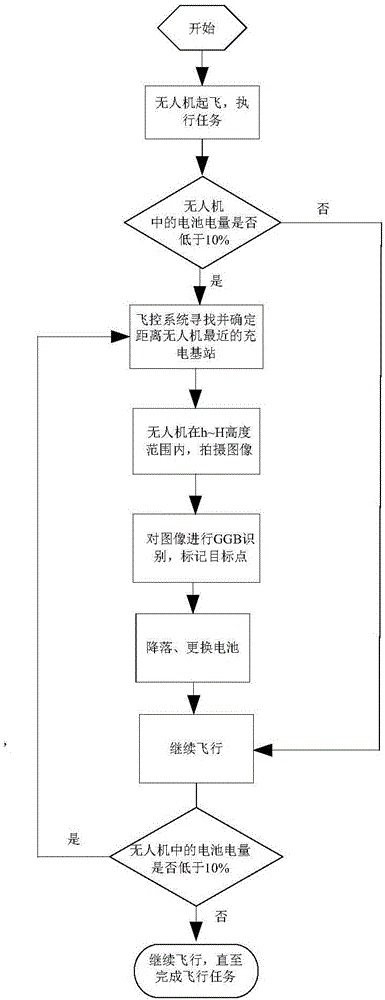
[0041] A control method for fully autonomous ultra-long-distance flight of UAVs, such as figure 2 shown, including the following steps:
[0042] Step 1. When the UAV is performing a flight mission, the first positioning module transmits the current position coordinate information of the UAV to the flight control system in real time, and the power detection module detects the battery power in real time. When the battery power is lower than 10%, the flight control The system compares the current position coordinates of the drone with the position coordinates of each charging base station, and determines the charging base station closest to the drone at this time;
[0043] Step 2. The flight control system controls the drone to fly to the nearest charging base station, and controls the vertical height between the drone and the charging base station to be within the range of h to H meters, and then controls the camera to take pictures of the charging base station, and the capture...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More