Lane line detection method based on ORB feature extraction
A technology for lane line detection and feature extraction, applied in instruments, character and pattern recognition, computer parts, etc., can solve problems such as inability to obtain accurate detection results, achieve good application prospects, ensure minimal computational overhead, and ensure real-time performance. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
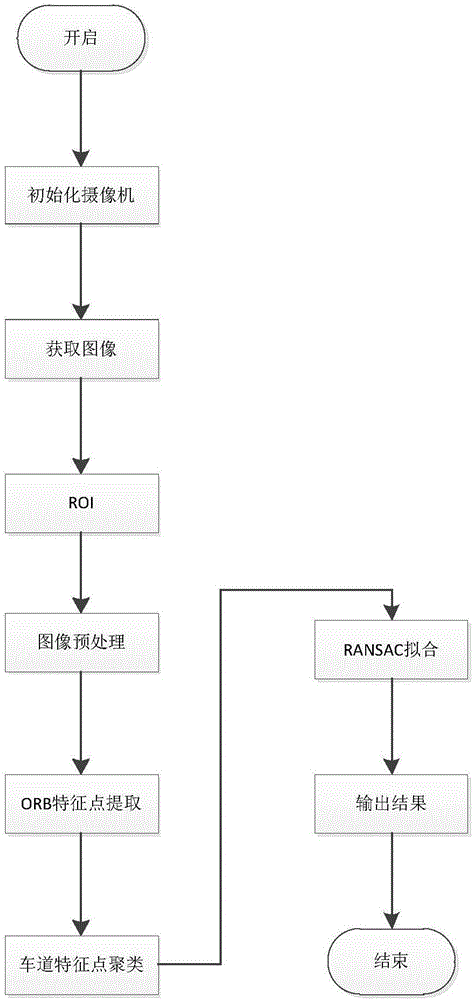
[0030] like figure 1 As shown, an embodiment of the present invention provides a lane line detection method based on ORB feature extraction, which includes the following steps:
[0031] Step 1: Image acquisition;
[0032] Configure the on-board camera of the smart car to set the parameters (exposure, white balance, etc.), make the quality of the collected images reach the optimal state, and collect road and lane images in real time;
[0033] Step 2: Grayscale the image;
[0034] Convert the image captured by the camera into a grayscale image;
[0035] Step 3: Region of interest extraction;
[0036] After the camera acquires the image, it is necessary to extract the region of interest from the original image to exclude the interference of non-lane features. The region of interest is a trapezoidal region, and the region of interest must contain all the features of the front lane. We set the trapezoidal region as (X1, X2, X3, X4, Y1, Y2), wherein (X1, Y1), (X2, Y1), (X3, Y2),...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



