

Path planning method and system based on urban traffic control signal lights
A path planning and urban traffic technology, applied in traffic control systems, traffic control systems of road vehicles, instruments, etc., can solve problems such as simple calculation conditions and inability to provide comprehensive considerations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0056] 1. First, obtain the urban road network data through GPS or an information server.
[0057] The urban road network data includes road names, node coordinates, whether there is a traffic control signal light at the node, and the average vehicle speed in the area. Node coordinates are represented by i(x,y), through which the Manhattan distance between two nodes is calculated.
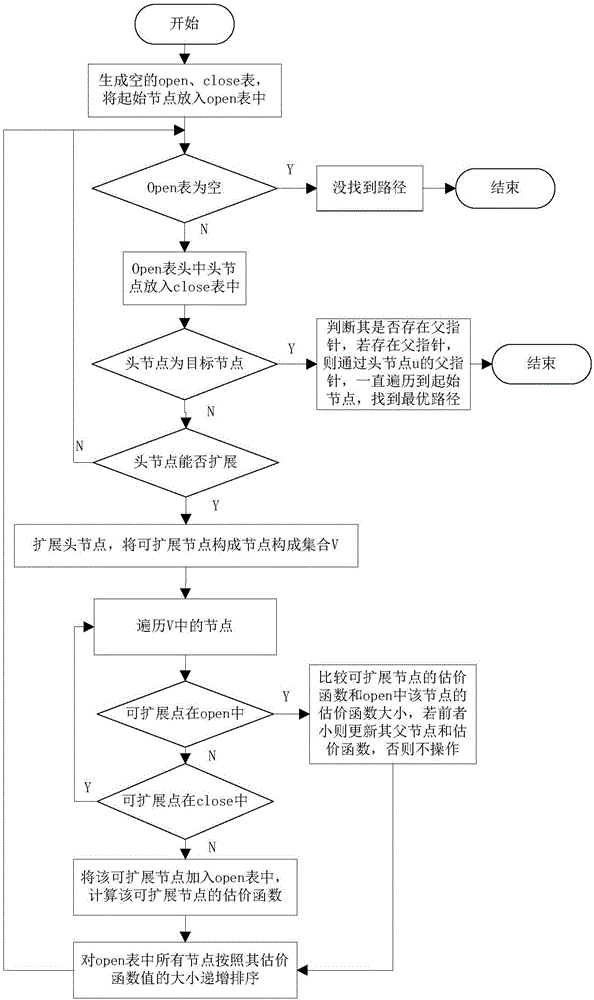
[0058] 2. If Figure 4 , where node 4 is the starting node, node 10 is the target node, when at node 4, the expandable nodes of node 4 are node 3 and node 5, then add node 3 and node 5 to the open table, and calculate two The evaluation function f(x) of the operator is sorted from small to large in the open table according to its value.
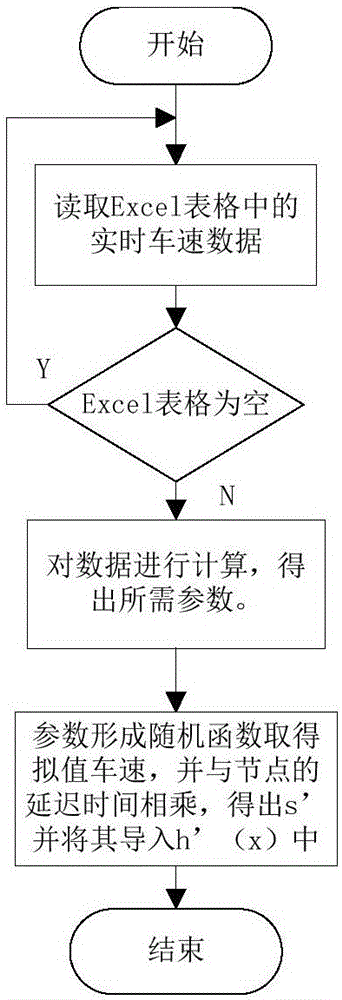
[0059] L s = L 4,5 +s'(N 5 )+L 5,6 +s'(N 6 )+L 6,7 +s'(N 7 )+L 7,12 +s'(N 12 )+L 11,12 +s'(N 11 )+L 10,11
[0060] Calculation of the estimated function of the path: Assuming that all nodes are in the area, the vehicle speed in the area is updated e...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More