

AGV (automated guided vehicle) traffic control method and apparatus
A technology of traffic control and trolley, which is applied in non-electric variable control, control/regulation system, two-dimensional position/channel control, etc. It can solve the problems of waiting for trolleys at the same time and reducing the operating efficiency of trolleys, so as to improve operating efficiency and reduce The effect of waiting time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
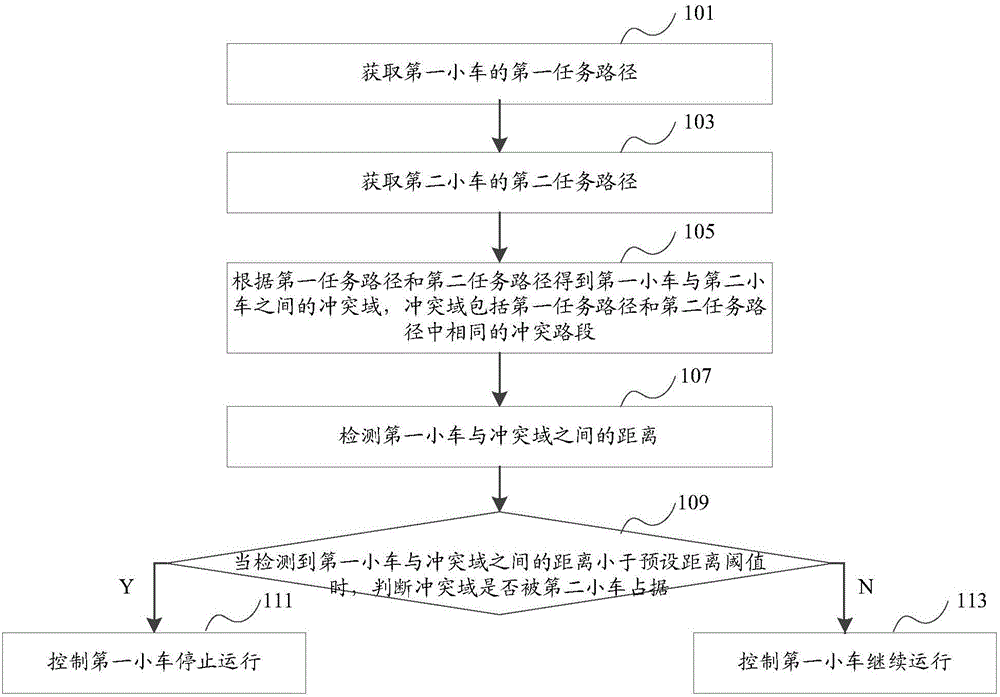
[0043] Such as figure 1 As shown, in one embodiment, a kind of AGV traffic control method is provided, comprising:
[0044] Step 101, acquire the first task route of the first car.
[0045] In this embodiment, there may be many automatic guided vehicles, each of which has its own mission route and performs its own mission. The first car is a car randomly selected from all automatic guided vehicles, and the task path of the first car is the first task path.
[0046] Step 103, acquiring the second task route of the second car.
[0047] In this embodiment, the second car is any car other than the first ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More