

Strain type six-dimensional force transducer
A six-dimensional force sensor and strain gauge technology, applied in the field of sensors, can solve problems such as inter-dimensional coupling stiffness sensitivity contradictions, and achieve the effects of eliminating inter-dimensional coupling, good sensitivity, and high stiffness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
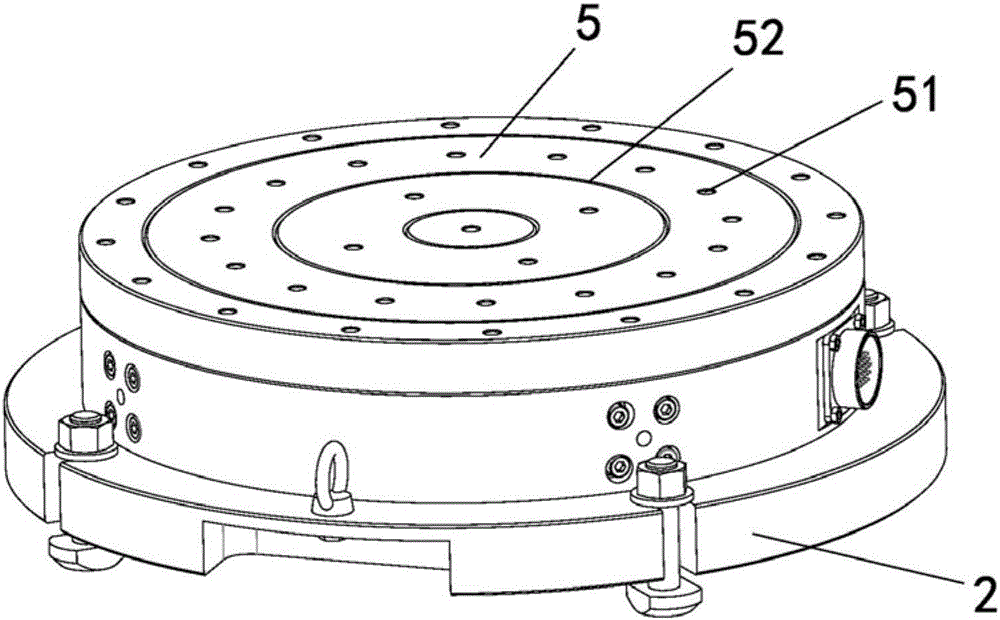
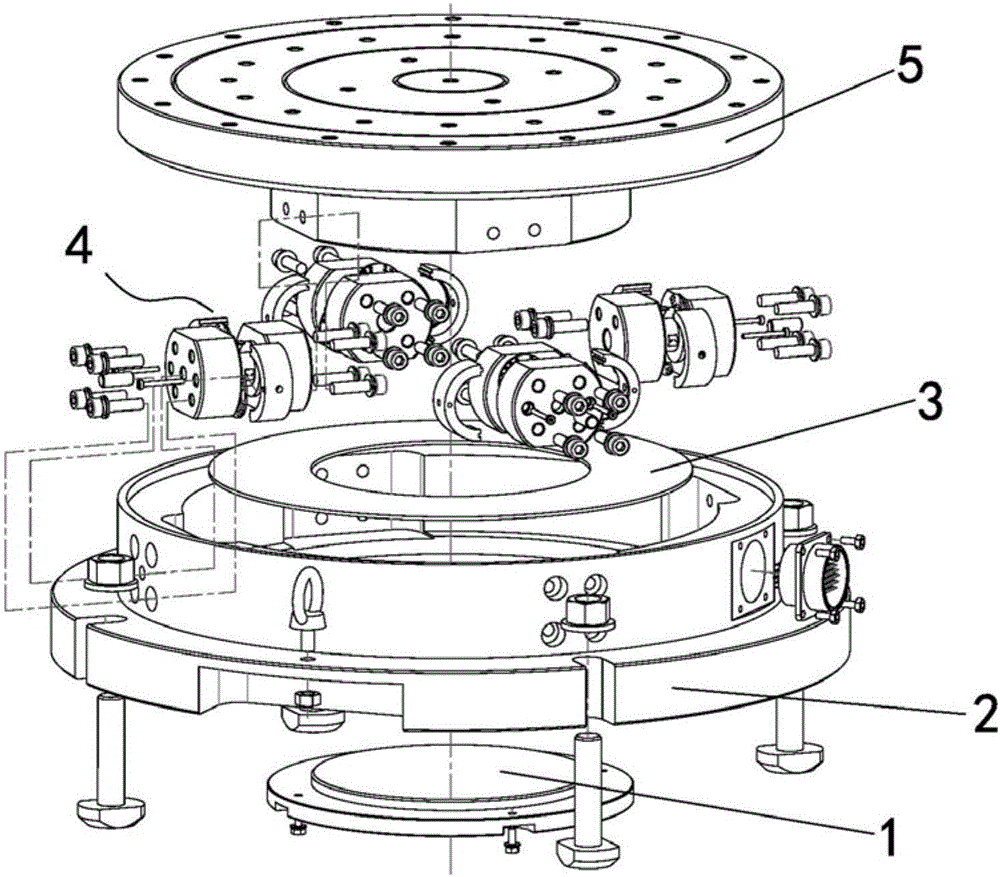
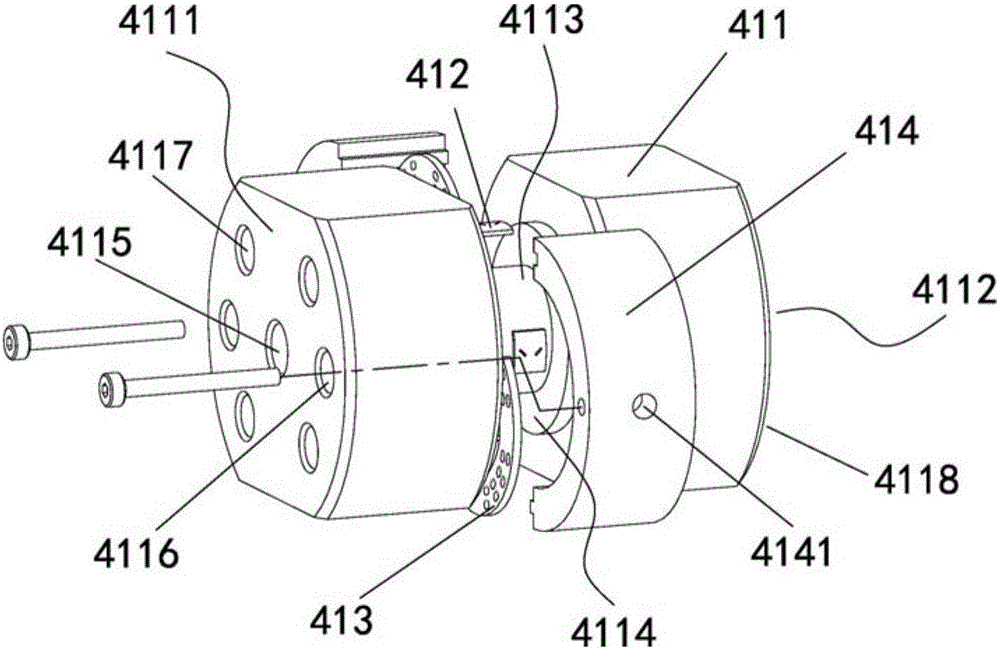
[0033] A strain gauge six-dimensional force sensor, such as figure 1 with figure 2 as shown, figure 1 It is a schematic diagram of the overall structure of the strain type six-dimensional force sensor of the embodiment of the present invention; figure 2 It is an explosion diagram of a strain gauge six-dimensional force sensor according to an embodiment of the present invention, including a bottom cover 1, a base 2, a circuit board 3, an elastic body 4 and a top cover 5, and the bottom cover 1 is connected to the bottom surface of the base 2 , the circuit board 3 is located inside the base 2, the four elastic bodies 4 are evenly distributed in the base 2, the outer end 4111 of the sensitive element of the elastic body 4 is connected with the base 2, the The inner end 4112 of the sensitive element of the elastic body 4 is connected to the top cover 5 , and the top cover 5 is supported on the base 2 through the elastic body 4 .
[0034] The base 2 includes a cylindrical base...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More