

Multi-joint model robot
A multi-joint, robotic technology, applied in the field of robotics, can solve the problems of high price of steering gear, the inability of the prosthetic model to simulate the wearing effect, and the failure of the performance of the steering gear to meet the requirements of use, so as to achieve the effect of reducing costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The following description serves to disclose the present invention to enable those skilled in the art to carry out the present invention. The preferred embodiments described below are only examples, and those skilled in the art can conceive of other obvious modifications. The basic principles of the present invention defined in the following description can be applied to other embodiments, variations, improvements, equivalents and other technical solutions without departing from the spirit and scope of the present invention.
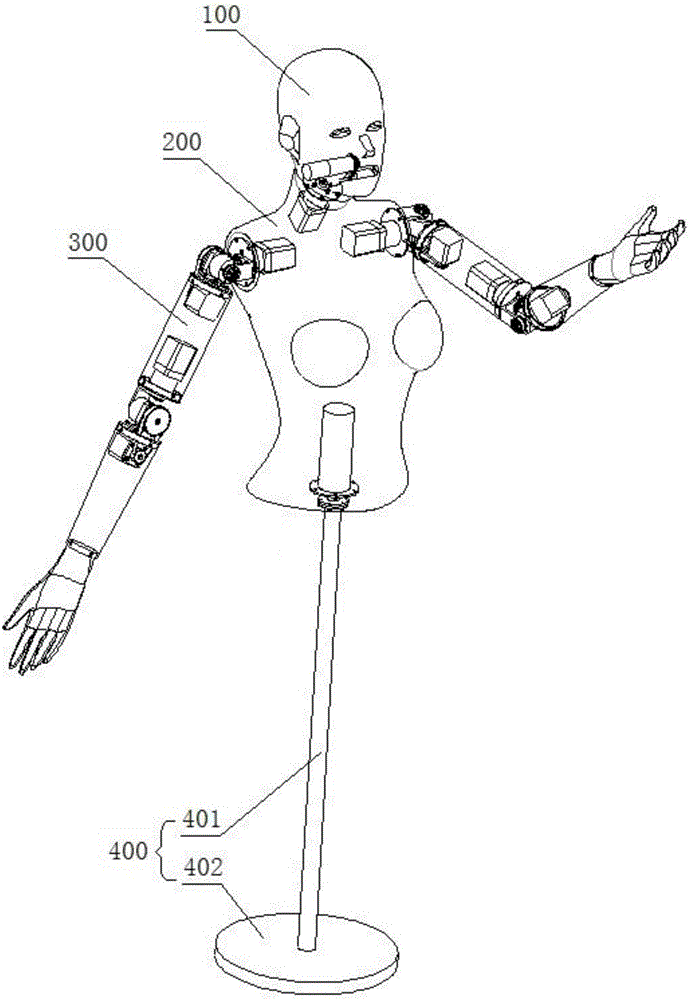
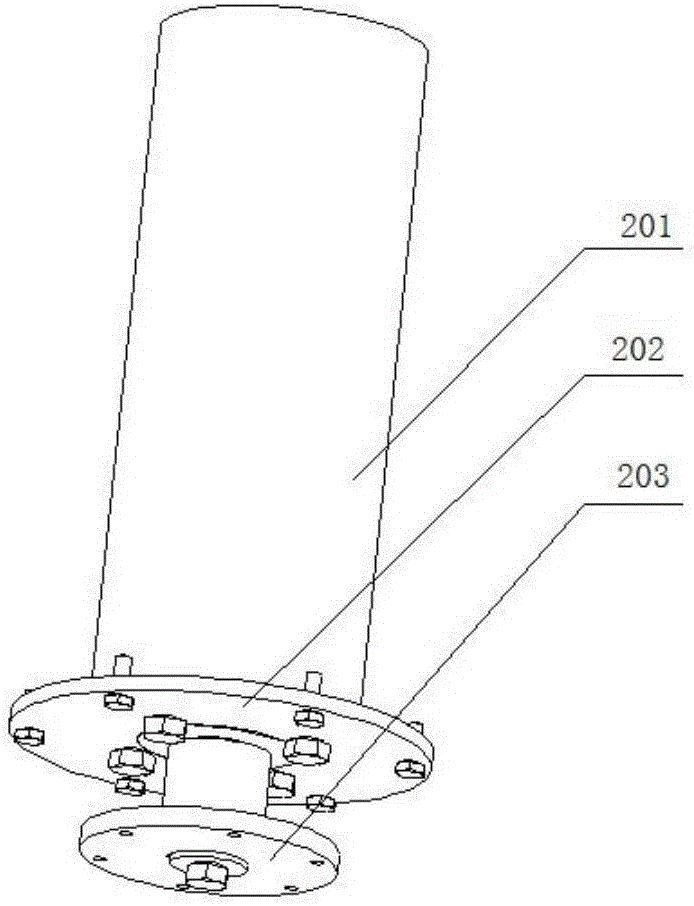
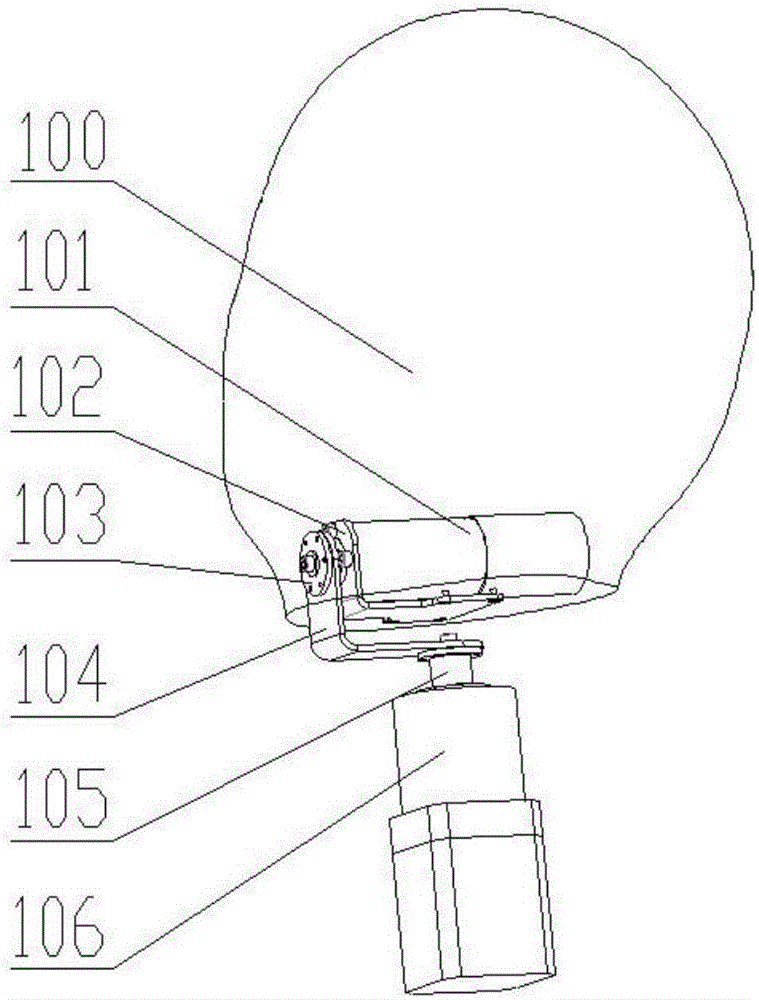
[0031] The multi-joint mannequin robot of the present invention mainly includes an upper body shell 200 and an arm shell 300, and the head shell 100 and the base 400 which are movably connected with the upper body shell 200 are selectively installed according to actual conditions.
[0032] see figure 1 and Figure 4 , shows a multi-joint mannequin robot according to a preferred embodiment of the present invention, including an upper body shell 2...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More