Method for acquiring target depth image
A technology of depth image and target depth, applied in the 3D field, can solve the problems of depth image error, 3D sensor is not suitable for multi-scene applications, etc., to achieve the effect of improving accuracy and convenience
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
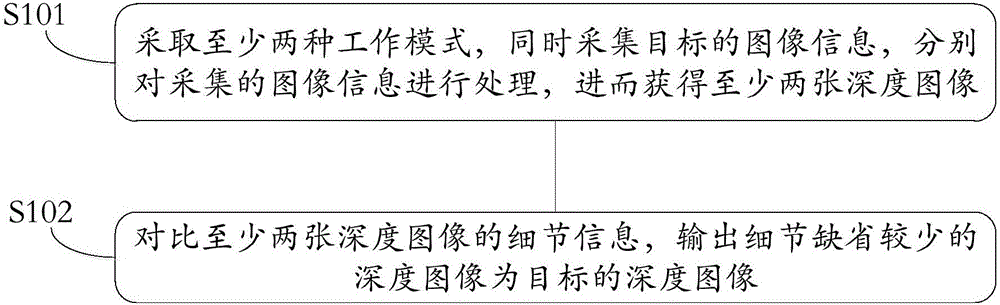
[0019] see figure 1 , figure 1 It is a schematic flowchart of an embodiment of a method for obtaining a target depth image in the present invention, including:
[0020] S101: adopt at least two working modes, collect image information of the target at the same time, process the collected image information respectively, and obtain at least two depth images;
[0021] S102: Compare the detail information of at least two depth images, and output the depth image with less detail by default as the target depth image:
[0022] Specifically, compare the brightness of the same region of the target on at least two corresponding regions of the depth image, and output a depth image with a large brightness contrast of adjacent regions and less periodically repeated texture as the target depth image.
[0023] Step S101 will be further described in detail below.
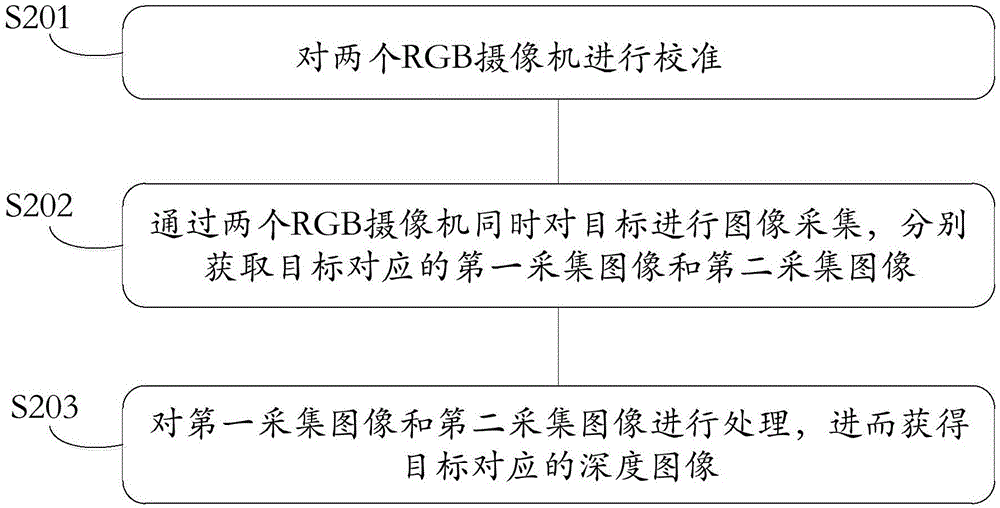
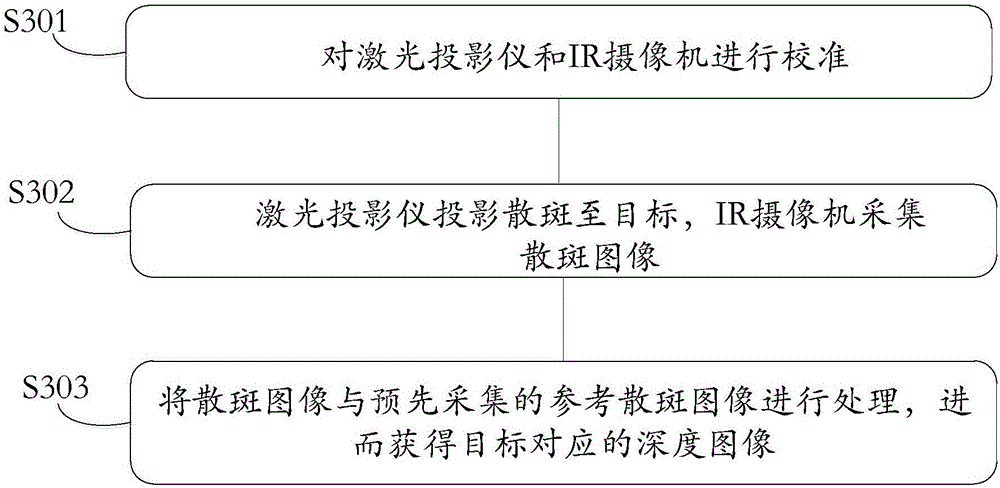
[0024] In this embodiment, two working modes are adopted to collect images of the target at the same time, namely the first wo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com