

Airfield runway detection robot
A technology for airport runways and robots, applied in instruments, manipulators, measuring devices, etc., can solve the hidden dangers and risks of aircraft take-off and landing safety problems, low efficiency of detection methods, tire punctures, etc., and achieve wide application value and market prospects , good runway safety maintenance, and the effect of liberating the labor force
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
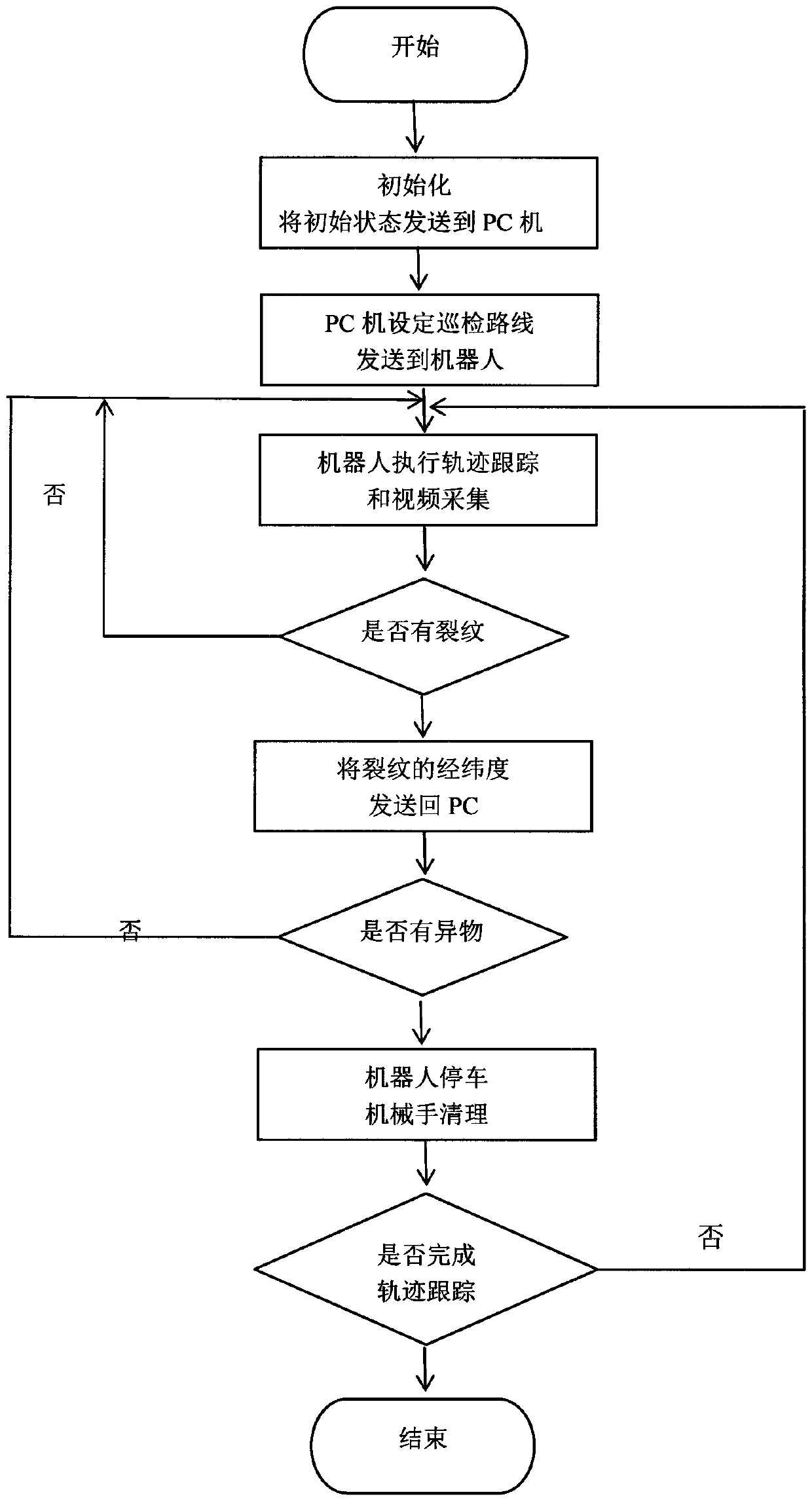
[0009] Specific embodiments are given below in conjunction with the accompanying drawings to further illustrate how the present invention is realized.
[0010] exist figure 1 Among them, the basic work of the airport runway detection system mainly includes the following contents: the collection and recording of each state of the robot; the robot sends the body state back to the remote PC through WiFi, and waits for the control command of the PC; the PC sets the airport runway inspection Path and trajectory, send instructions to the robot in the form of TCP protocol through WiFi; the robot performs trajectory tracking on the received inspection route, that is, pose closed-loop control; while the robot is tracking the trajectory, it performs airport runway video collection and analyzes to determine whether There are foreign objects or cracks on the airport runway. If there are foreign objects, the robot will stop and control the manipulator to remove the foreign objects. If ther...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More