

Under-actuated deforming wheel type obstacle crossing robot
An under-actuated, robotic technology, applied in the field of robotics, can solve the problems of complex structure, low motion noise and high cost, and achieve the effects of simple mechanical structure, strong ground adaptability, and low manufacturing cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] Below in conjunction with accompanying drawing, the present invention will be further described
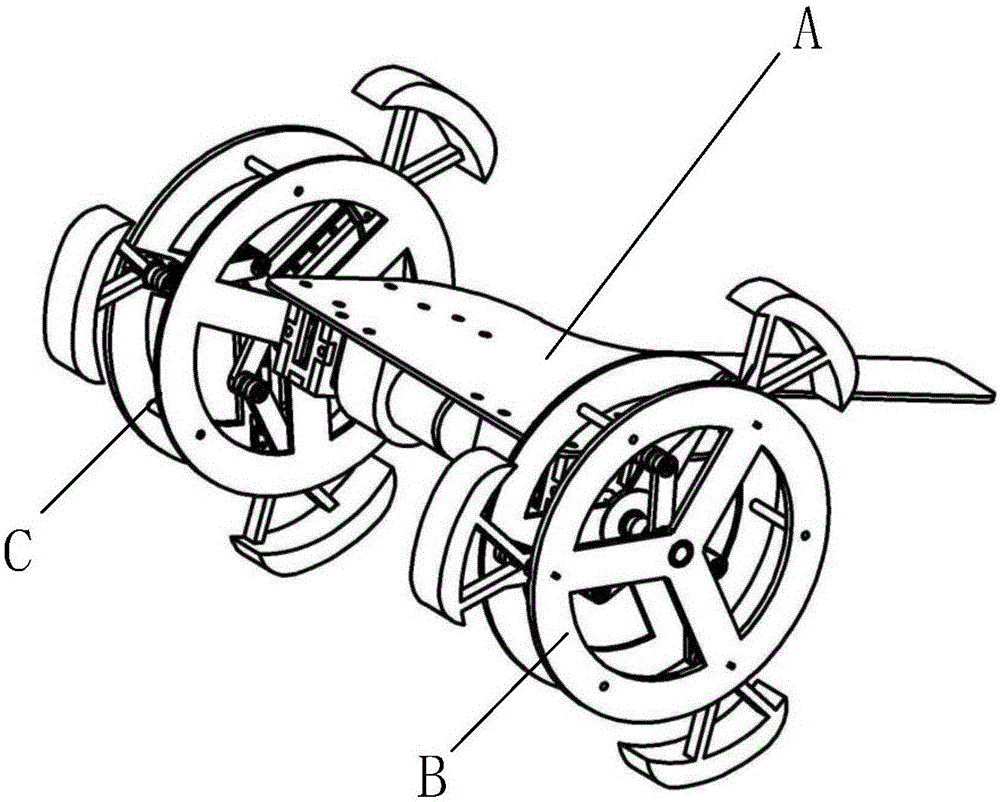
[0030] Such as figure 1 As shown, an underactuated deformed wheeled obstacle-climbing robot is composed of a body A, a left wheel train B, and a right wheel train C; the input shafts of the left wheel train B and the right wheel train C and the motor shaft of the body A pass through bearings and couplings Form a rotary joint.
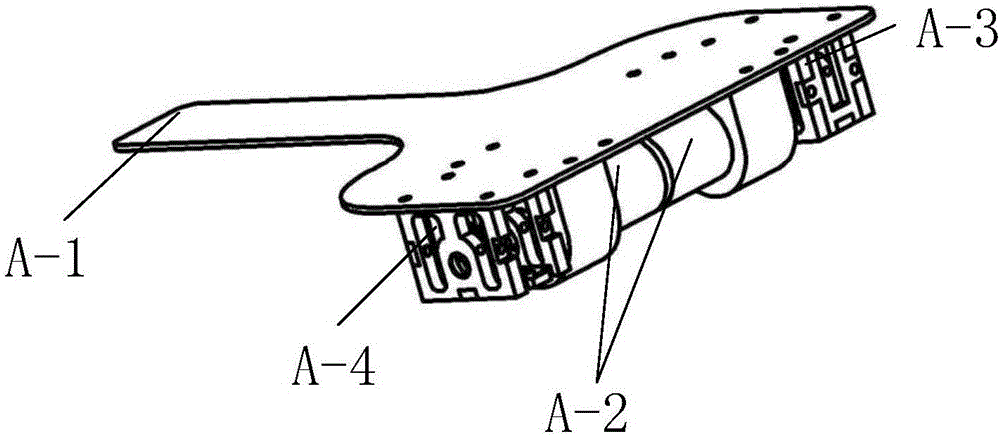
[0031] Such as figure 2 As shown, the vehicle body A is composed of a vehicle body shell A-1, a motor A-2, a left support base A-3, and a right support base A-4. The motor A-2 itself has a mounting hole and is fixedly connected to the vehicle body shell A-1; the left support base A-3 and the right support base A-4 are fixedly connected to the vehicle body shell through bolts. The left supporting seat A-3 and the right supporting seat A-4 support the input shafts of the left wheel train B and the right wheel train C and the output shaft of the mot...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More