

IMU drift compensation method based on monocular vision
A drift compensation, monocular vision technology, applied in image analysis, instruments, calculations, etc., can solve the problems of IMU error accumulation, inability to apply long-term direction estimation, etc., to achieve the effect of solving long-term error accumulation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0052] The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
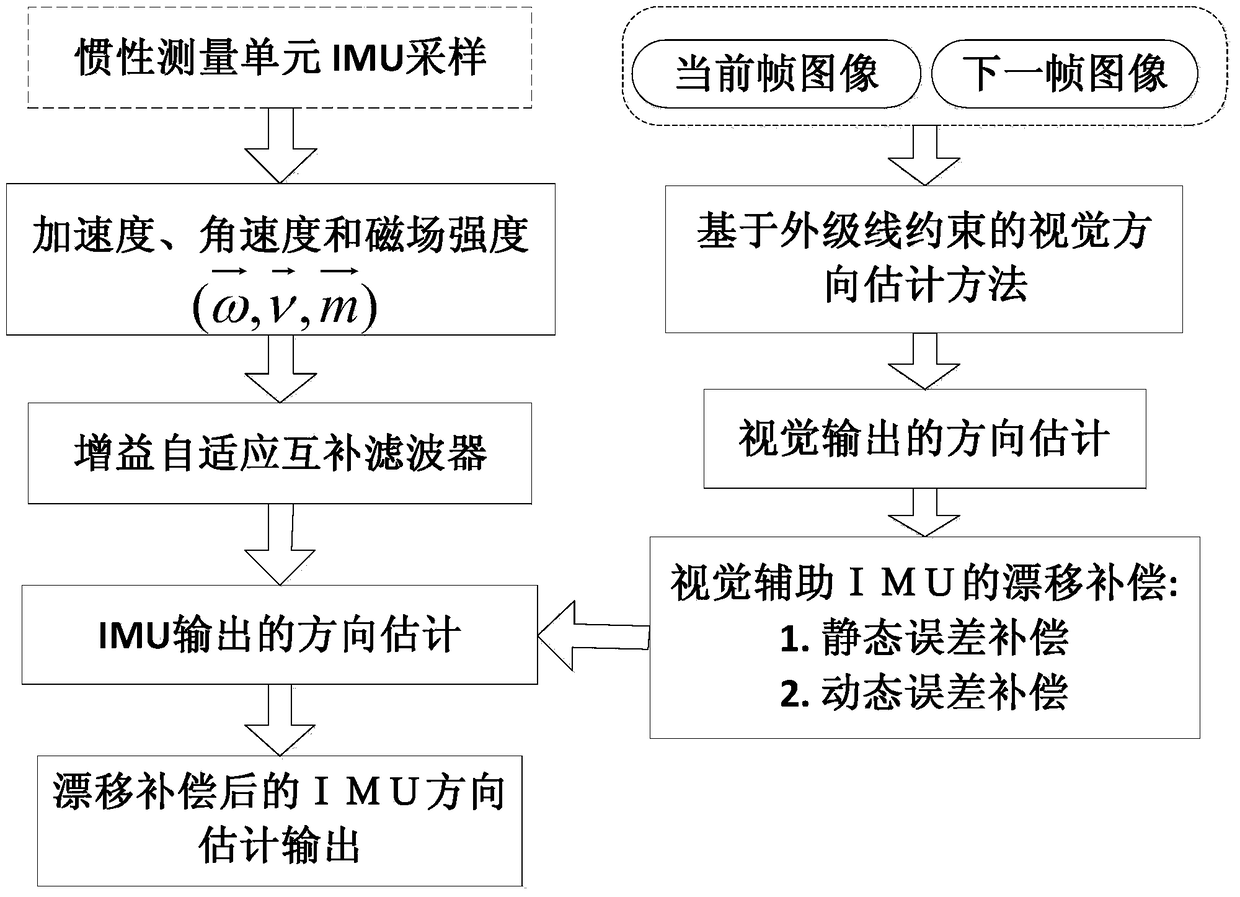
[0053] The inventive method comprises three parts (as figure 1 shown):
[0054] (1) Direction estimation based on IMU;
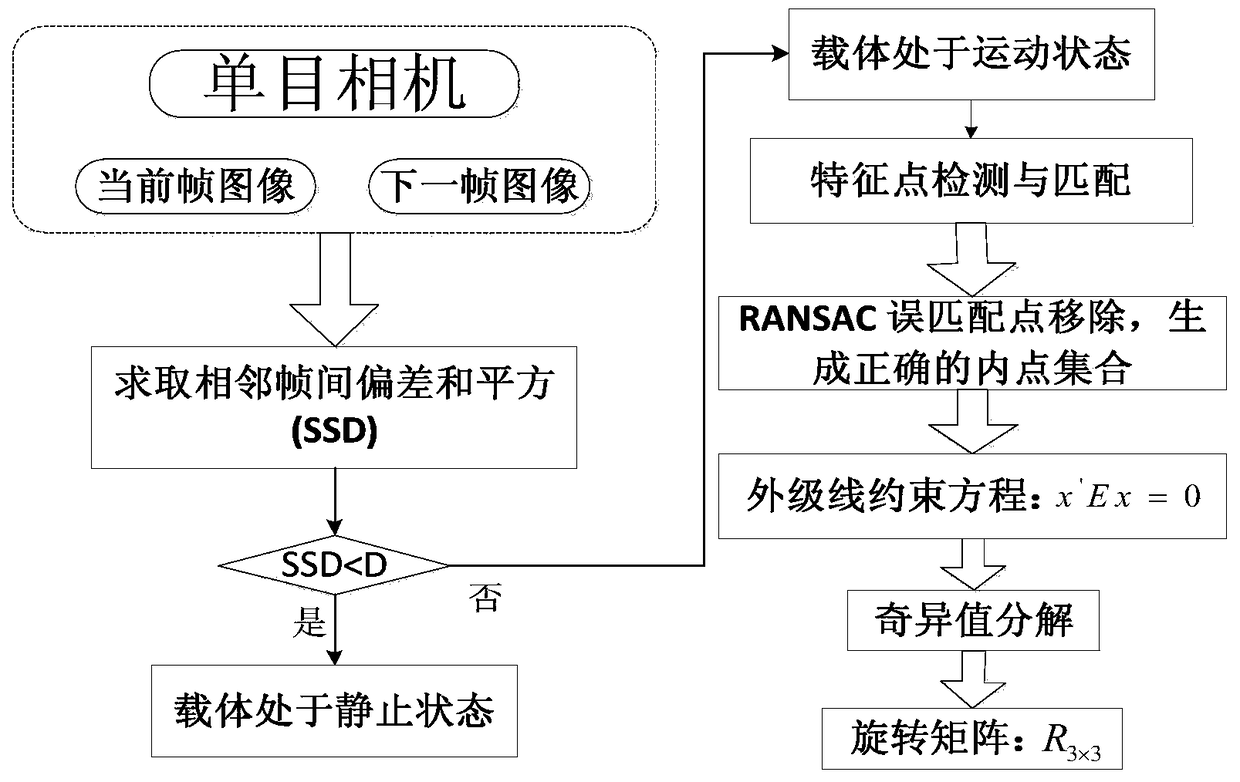
[0055](2) Direction estimation of the monocular camera;
[0056] (3) Error compensation of the visual aid IMU.
[0057] The specific implementation process is as follows.
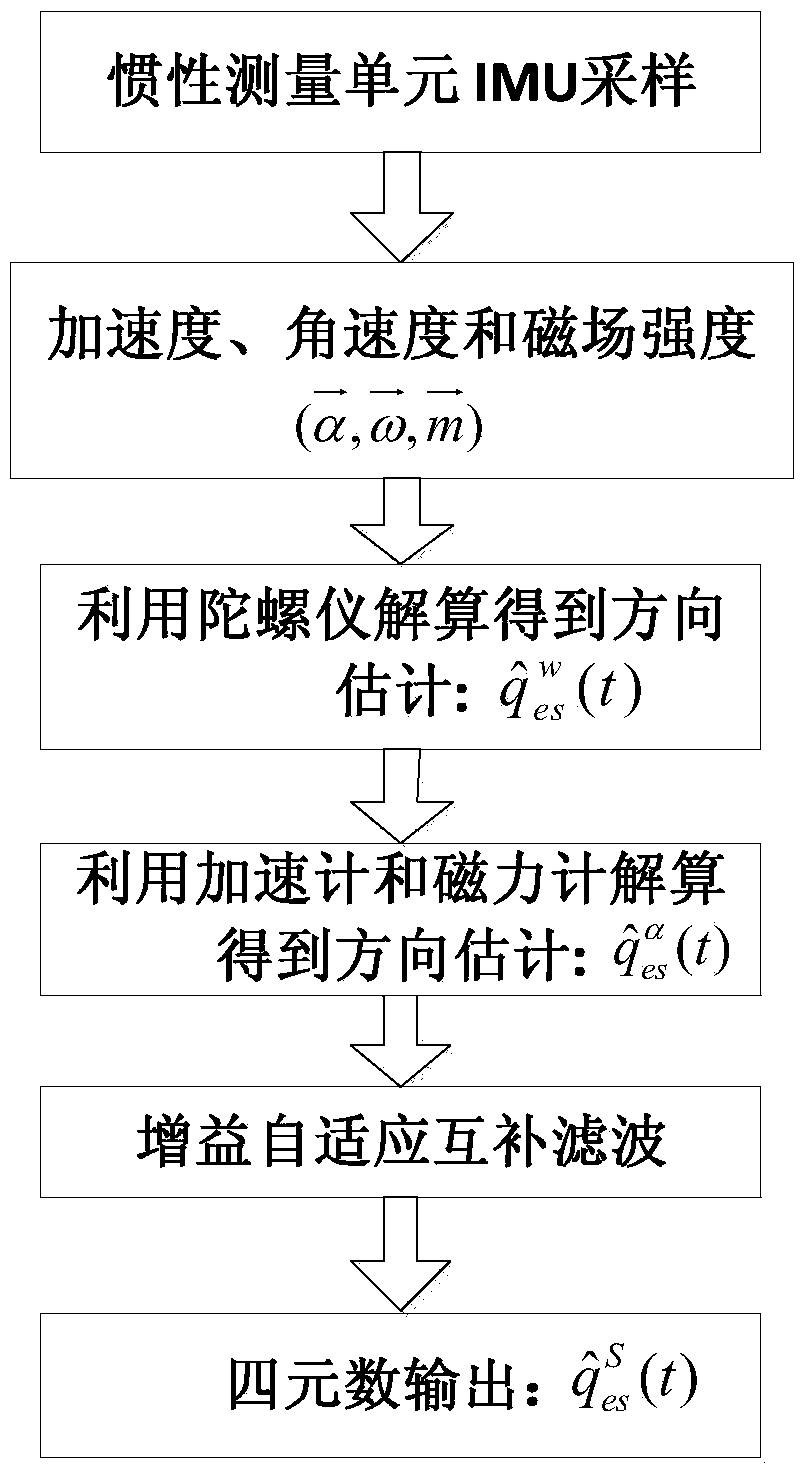
[0058] Step 1: IMU-based orientation estimation (such as figure 2 shown).
[0059] Step 1.1: Compute the orientation estimate for the gyroscope
[0060]
[0061] in Indicates the quaternion estimated by the IMU gyroscope at time t, which consists of (q 0 ,q 1 ,q 2 ,q 3 )express. Among them, the q in the quaternion 1 ,q 2 ,q 3 The components correspond to the projection of the rotation axis in the X, Y, and Z directions, q 0 The component corresponds to the angle at which the IMU rotates around the rotation axis; Indicates the rate...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More