

AUV (autonomous underwater vehicle) interactive auxiliary positioning system and AUV interactive auxiliary positioning method based on SINS (strapdown inertial navigation system)/LBL (long base line)
An auxiliary positioning system, underwater acoustic positioning technology, applied in positioning, radio wave measurement system, navigation through speed/acceleration measurement, etc., to achieve the effect of ensuring accuracy, improving underwater operation efficiency, and solving the problem of long-term error accumulation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The present invention will be further described in detail below in conjunction with the drawings.
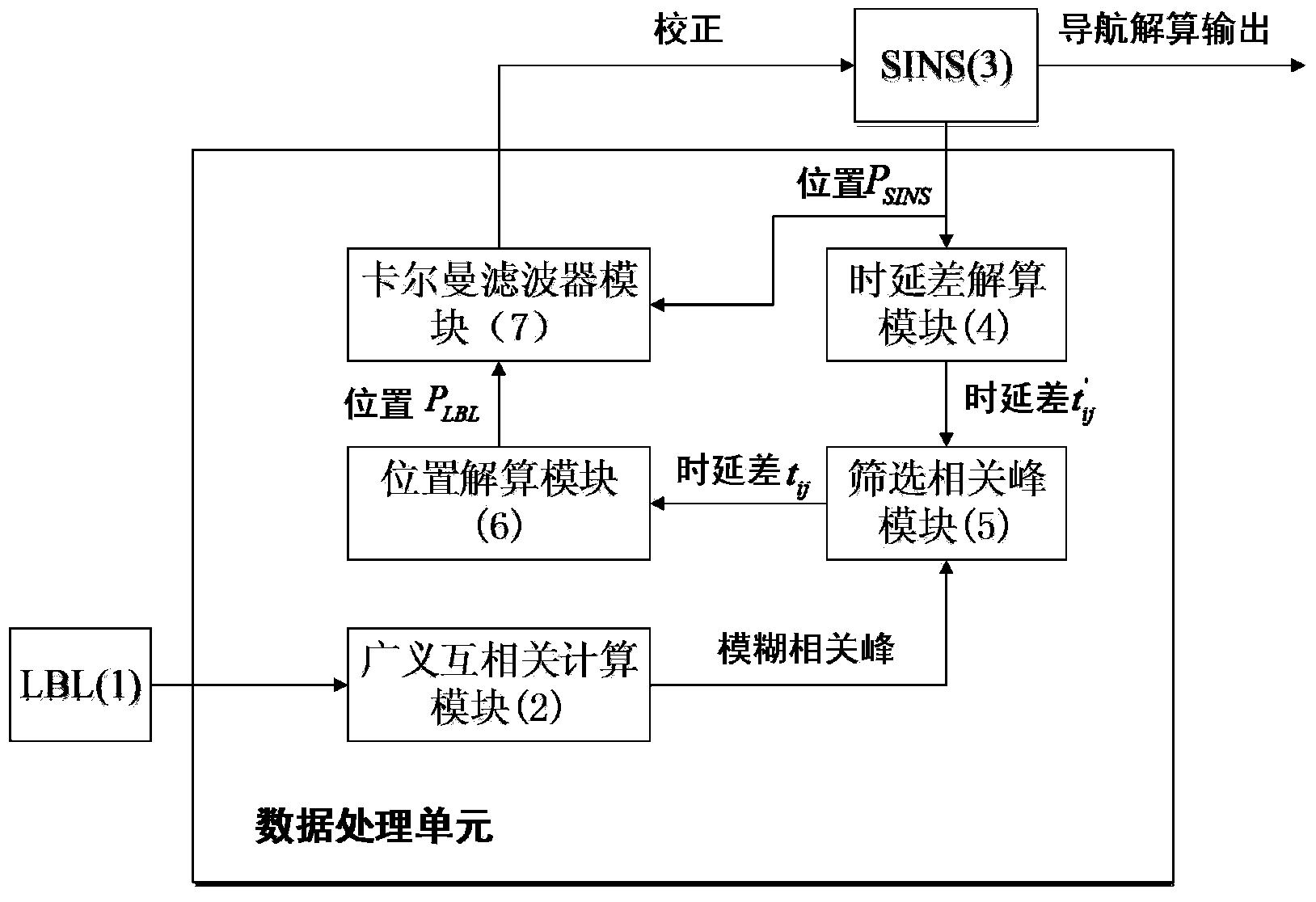
[0030] Such as figure 1 As shown, the present invention consists of a strapdown inertial navigation system SINS3 installed on the AUV, a long baseline hydroacoustic positioning system LBL1 placed on the seabed, and a data processing unit. The data processing unit includes a generalized cross-correlation calculation module 2. Peak module 5, position calculation module 6, delay difference calculation module 4, and Kalman filter module 7 provide continuous high-precision position information for the AUV through the use of SINS and LBL interactive auxiliary positioning, which is implemented through the following steps:
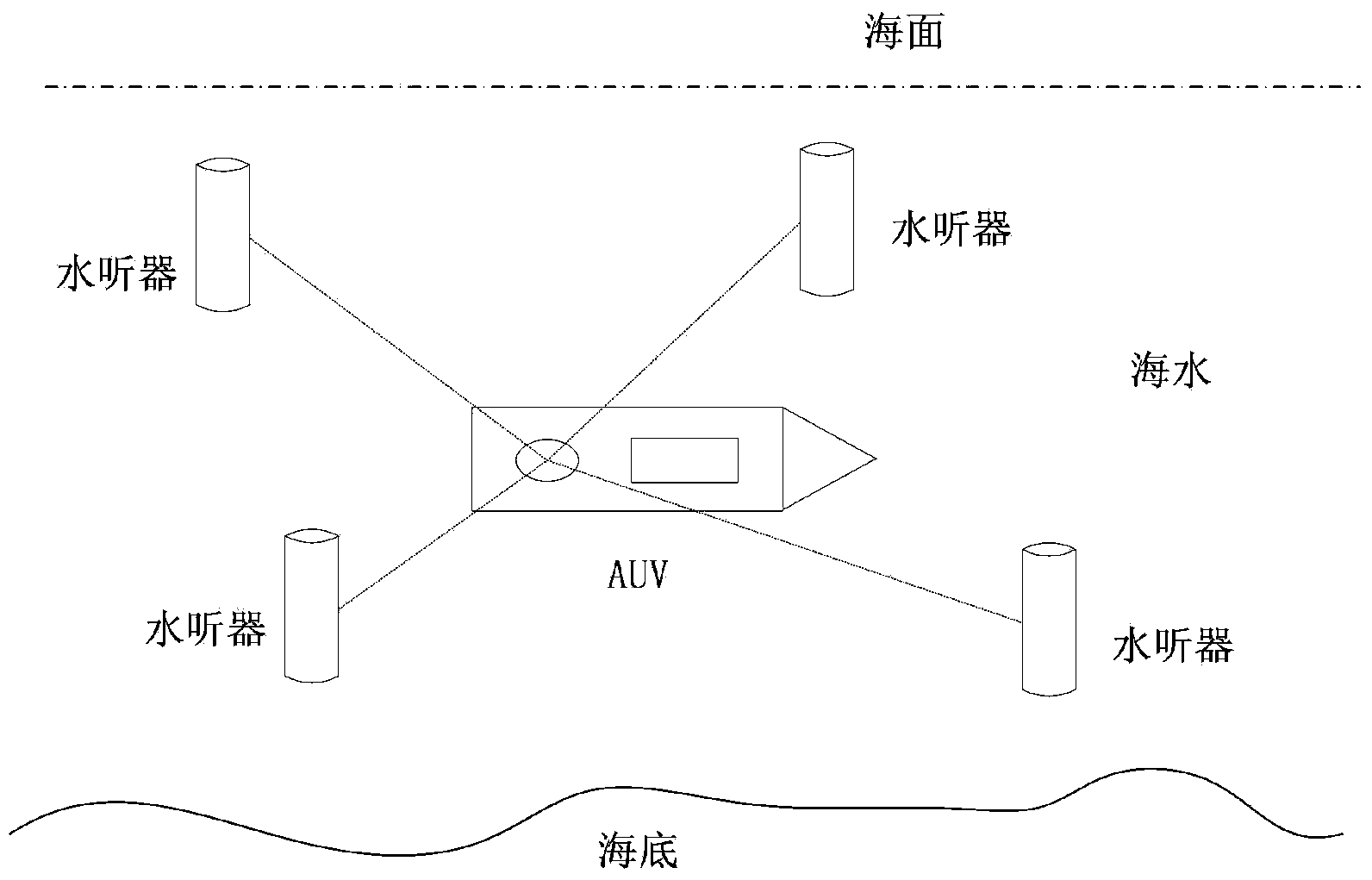
[0031] (1) The long-baseline hydroacoustic positioning system LBL1 is composed of four hydrophones placed on the seabed at known positions. The hydrophones receive the acoustic signals from the sound source on the AUV, and pass through the generalized cross-correl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More