

Robot path planning method and device in indoor dynamic environment and robot
A dynamic environment and path planning technology, applied in the field of robotics, can solve problems such as insufficient environmental information, inability to adapt to changing environments, and easy loss of targets
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 2
[0104] The embodiment of the present invention also provides a robot path planning device 200 in an indoor dynamic environment, such as Figure 6 As shown, it includes a global cost map establishment module 210 , an origin and destination setting module 220 , a path determination module 230 and a local obstacle avoidance control module 240 .
[0105] A global cost map establishment module 210, configured to establish a global cost map containing points with different path cost values according to known obstacle environment information and obstacle expansion information, wherein the path cost values of the points reflect that the points are obstructed The probability of object occupation, the path distance between the point and the adjacent point, and the distance between the point and the nearest obstacle;
[0106] The starting and ending point setting module 220 is used to set the starting point and target point of the robot in the global cost map;
[0107] The path dete...
Embodiment 3
[0123] The embodiment of the present invention also provides a robot 300, such as Figure 7 As shown, it includes a fuselage 310 and a processor 320, the processor 320 is installed in the fuselage, and the processor 320 is used for:
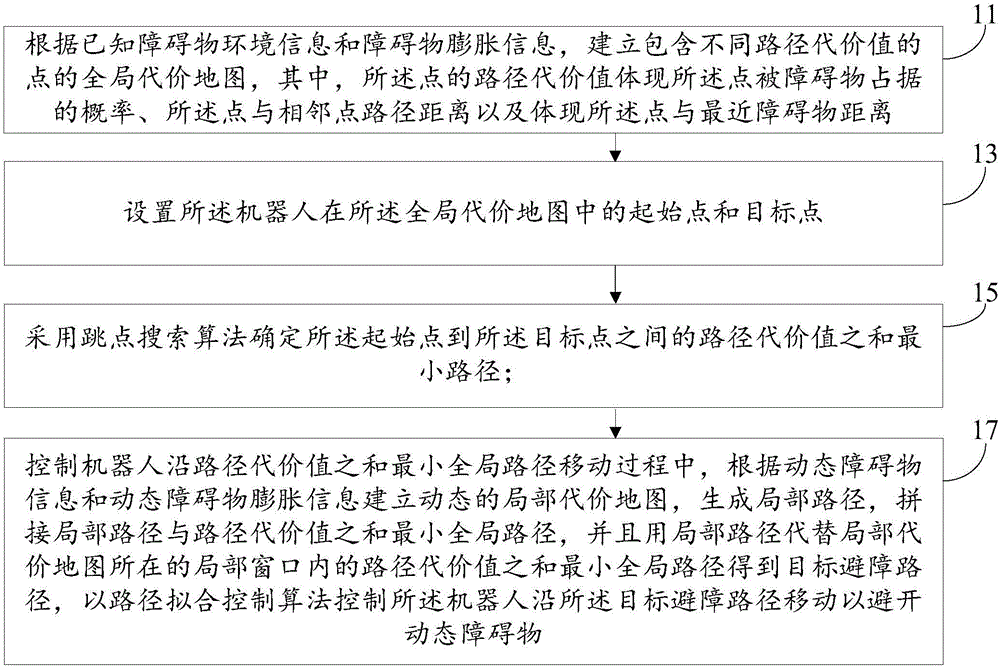
[0124] According to the known obstacle environment information and obstacle expansion information, a global cost map containing points with different path cost values is established, wherein the path cost value of the point reflects the probability that the point is occupied by obstacles, the point and The path distance of adjacent points and the distance between the point and the nearest obstacle;
[0125] Setting the starting point and target point of the robot in the global cost map;
[0126] Calculating the minimum global path of the sum of path cost values between the starting point and the target point by using a jump point search algorithm;
[0127] In the process of controlling the robot to move along the minimum global path of the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More