

Multi-Agent stalking-foraging behavior control method
A control method and behavior technology, applied in two-dimensional position/channel control and other directions, can solve the problems of increased discretization, low precision, dimensional disaster, etc., to reduce the state space, improve the efficiency of rounding, and improve the accuracy. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments. This embodiment is carried out on the premise of the technical solution of the present invention, and detailed implementation and specific operation process are given, but the protection scope of the present invention is not limited to the following embodiments.
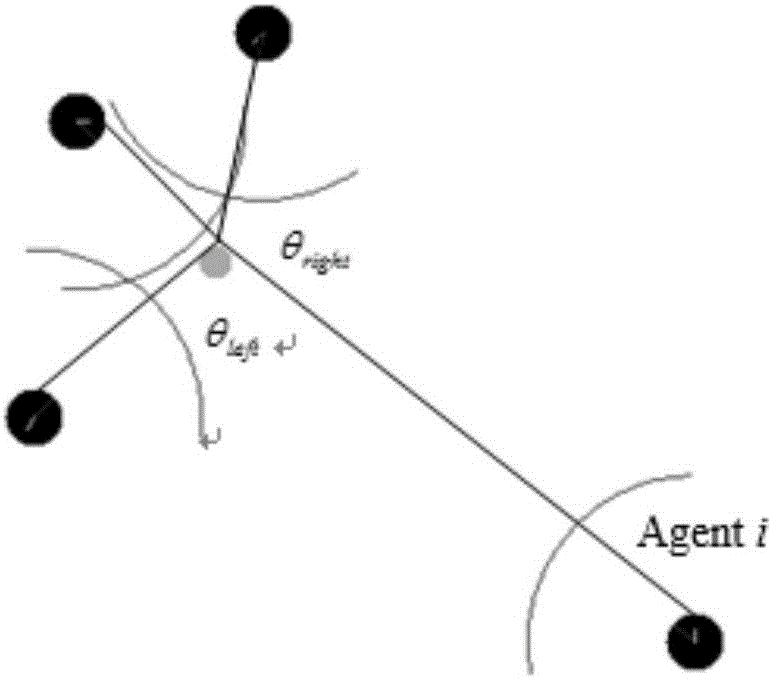
[0047] This embodiment provides a multi-Agent hunting-foraging behavior control method, which is based on a reinforcement learning algorithm, and a reward function is set to improve the learning efficiency of the robot. When using the reinforcement learning algorithm improved by the Option method for multi-agent round-up, the state space needs to be discretized first. In the multi-agent round-up problem, each robot participating in the round-up needs to know its position relative to the whole group and the position of the whole group relative to the prey In order to learn how to move ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More