

Multi-robot hunting system based on LSTM prediction
A multi-robot and robot technology, applied in the direction of radio wave measurement system, general control system, control/regulation system, etc., can solve the problems of low practicality, limited expansion function, lack of prior information, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
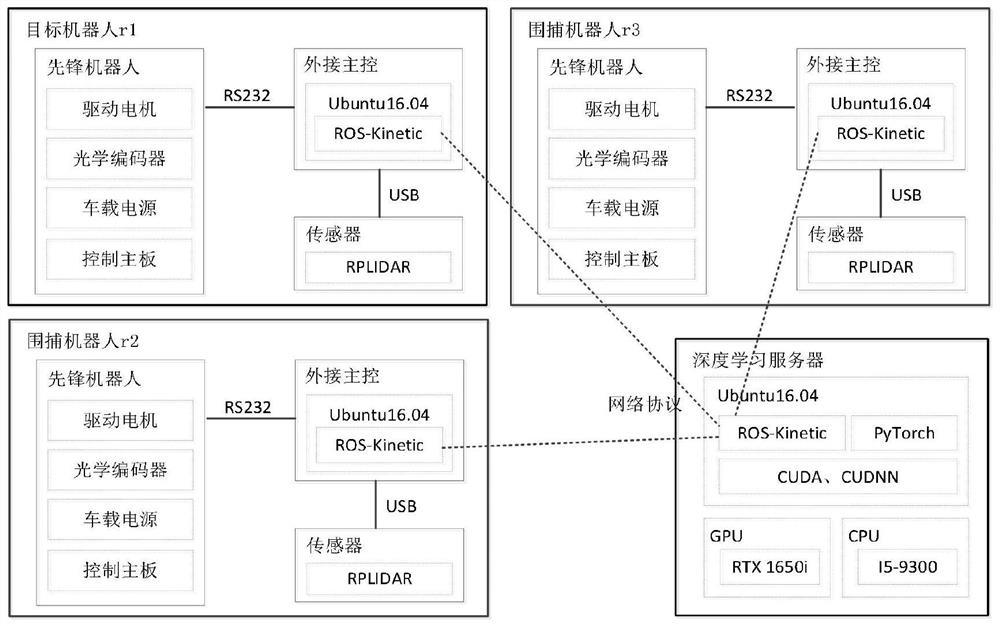
[0017] Based on the multi-robot round-up system predicted by LSTM, the three main controllers of the system (1) use a GTX1650 (i5-10300) laptop as the main CPU and integrate various data. The data acquisition sensor (2) is a laser radar Rplidar series, and the data interface is a USB2.0 interface. The GPU server (3) is used to process the data information received by the system, and return the position prediction result of the target robot at the next moment to (1) for path planning. Sonar (4) is used to collect surrounding distance information, and returns the information to (1) for data fusion. If the router (5) is a single-node router in a small outdoor scene, it can be multi-router networked to cover the entire system area if it is in a large and complex scene. Based on the ROS platform to build a multi-robot predictive round-up environment (6), the platform is open source and can realize code reuse on different robot platforms, reducing repetitive labor and enhancing sca...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More