

A bionic two-toed mechanical foot with plantar perception
A technology of perception ability and mechanical foot, which is applied in the field of engineering bionics, achieves the effects of wide application prospects, reduced energy consumption, and convenient control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
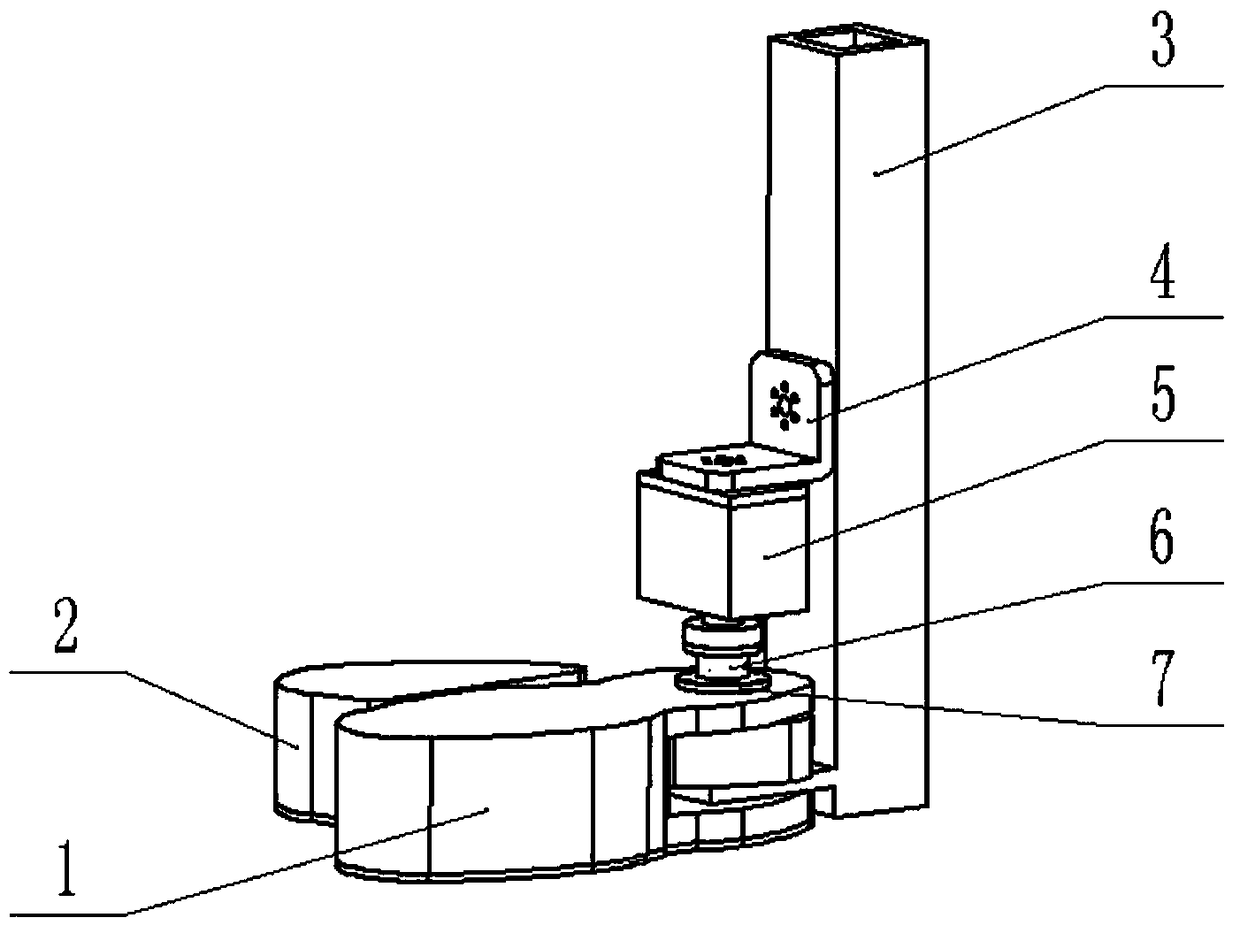
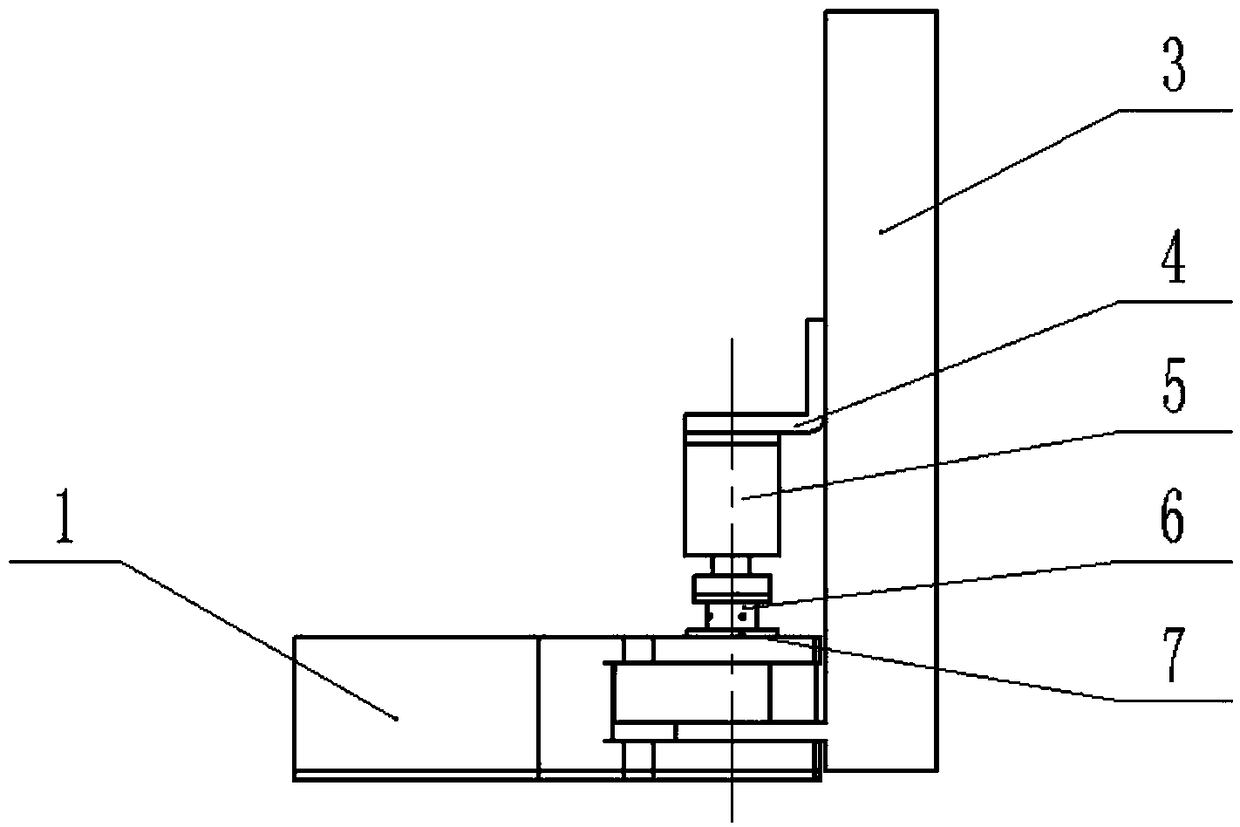
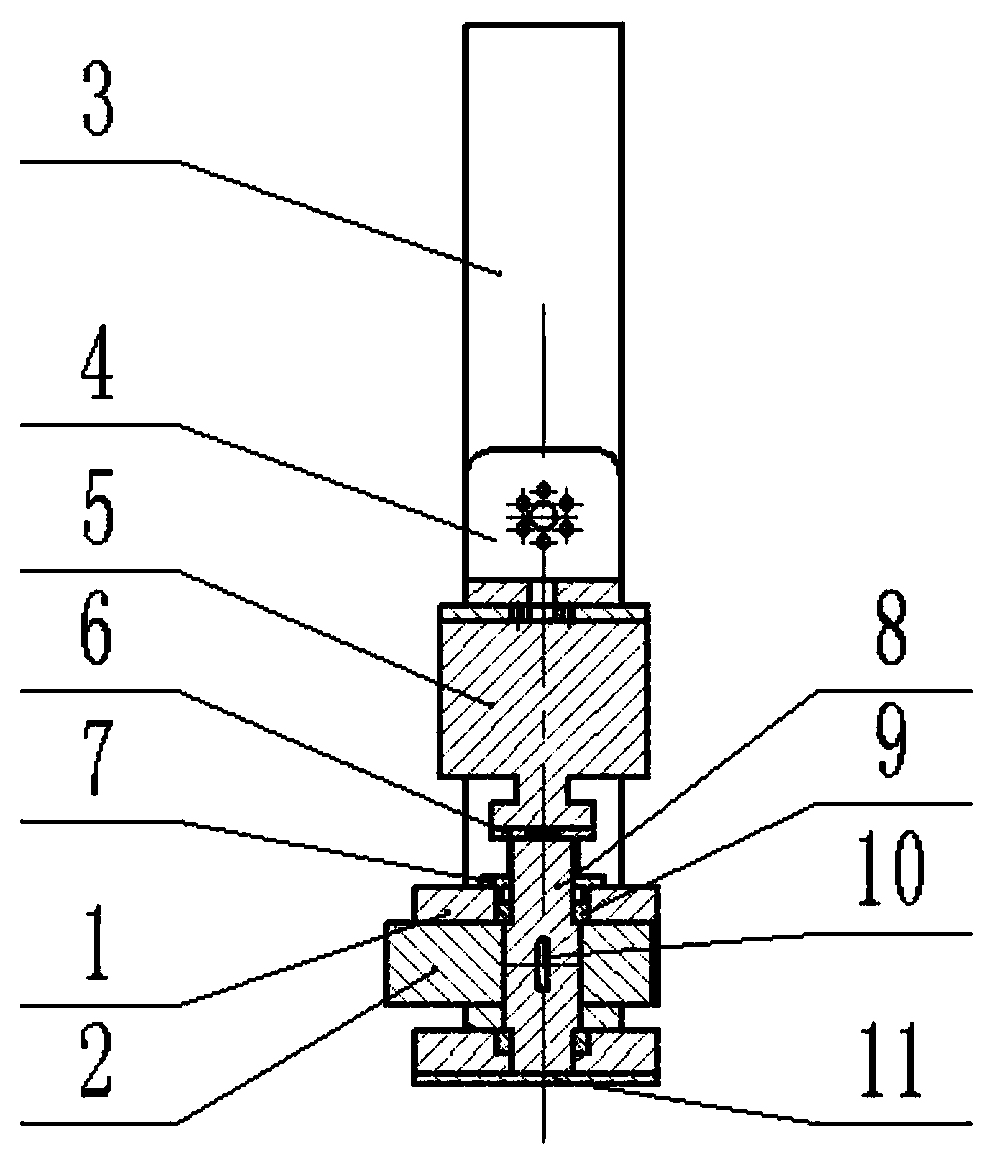
[0032] The invention discloses a bionic two-toed mechanical foot with sole sensing ability. The bionic mechanical foot is mainly composed of a mechanical system and a control system. Combine below Figure 1 to Figure 9 , the present invention will be described in detail.
[0033] The mechanical system mainly includes bearing toe 1, auxiliary toe 2, support rod 3, transmission shaft 8, key 10, connecting flange 6, bearing 9, bearing end cover 7, rudder frame 4 and rubber pad 11, such as figure 1 , image 3 , Figure 5 shown. Combine the load-bearing toe 1 and the auxiliary toe 2, the auxiliary toe 2 is partially inserted into the load-bearing toe 1, and the distance between the load-bearing toe 1 and the auxiliary toe 2 in the vertical direction is 3 mm, as Figure 4 shown. The bearing toe 1 and the support rod 3 are fixed with bolts, such as Figure 5 shown. The load-bearing toe 1 and the auxiliary toe 2 are connected by a drive shaft 8 at the heel of the toe, and the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More