

Path planning and control method for the unmanned driving of agricultural machine
A path planning and control method technology, applied in two-dimensional position/channel control, vehicle position/route/altitude control, non-electric variable control and other directions, can solve the problem of inability to obtain agricultural machinery kinematic model parameters in real time, low control accuracy, etc. problems, to achieve the effect of high control accuracy, wide adaptability and easy control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0102] The present invention will be further described below in conjunction with the accompanying drawings.
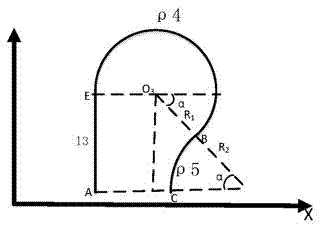
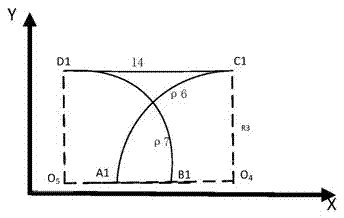
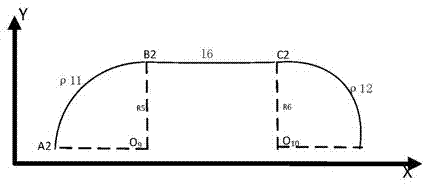
[0103] like Figure 1-15 A path planning and control method for unmanned agricultural machinery is shown, step 1: Obtain the environmental information of the agricultural machinery through the sensor to make a U-turn or obstacle avoidance decision; if it is an obstacle avoidance decision, plan the obstacle avoidance path trajectory, specifically including Following steps,
[0104] Step 101: use the improved shortest tangent method to calculate a theoretical obstacle avoidance path offline;
[0105] Step 102: Utilize the Bezier curve-based path optimization method to optimize the theoretical obstacle avoidance path in step 2 to obtain the actual obstacle avoidance path;
[0106] If it is a U-turn decision, plan the U-turn path trajectory, which specifically includes the following steps,
[0107] Step 101': input the operation mode of the agricultural machinery;
[0...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More