

Dispersedly stacked material pickup apparatus and method
A technology for picking up devices and materials, applied in image analysis, instruments, calculations, etc., can solve the problems of no three-dimensional object recognition algorithm, strong randomness, and few applications, and achieve the effect of solving the difficult problem of robot path planning.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] In order to make the object, technical solution and advantages of the present invention more clear, the present invention will be further described in detail below in conjunction with the examples. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
[0051] The application principle of the present invention will be described in detail below in conjunction with the accompanying drawings.
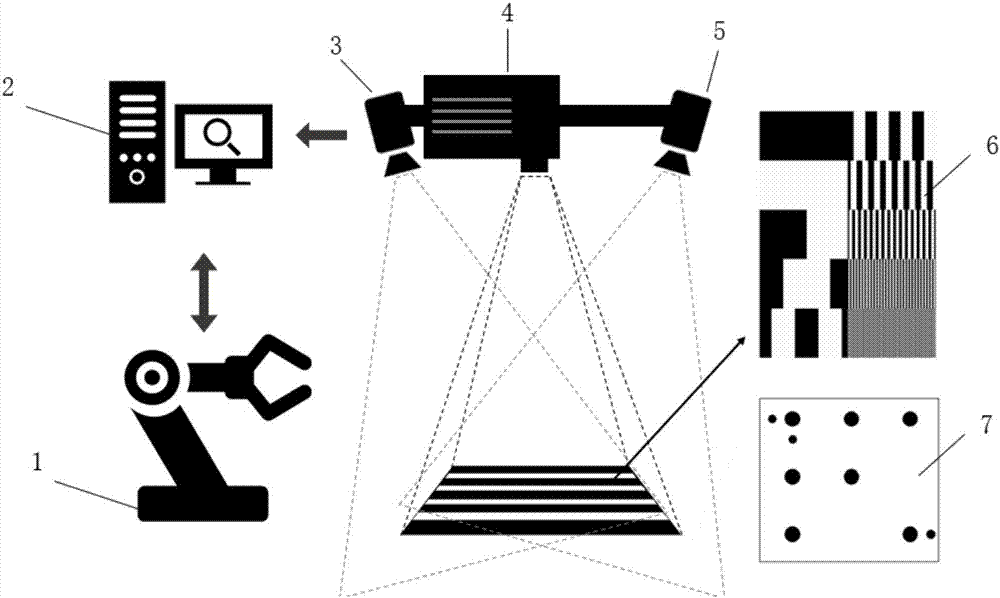
[0052] like figure 1 As shown, a pick-up device for scattered and piled materials includes a robot 1, a host computer 2, and a light measurement system; the light measurement system includes a projection device 4, a left camera 3 and a right camera 5 respectively located on the left and right sides of the projection device; The projection device sequentially projects Gray code images 6 into the material picking scene; the left camera 3 and the right camera 5 respectively collect the G...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More