

Plane two-freedom-degree parallel mechanism containing coupled branch chain
A degree of freedom, plane technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of affecting the motion accuracy of the mechanism, increase the manufacturing and assembly costs, etc., and achieve large motion space, less passive motion joints, and good economy. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
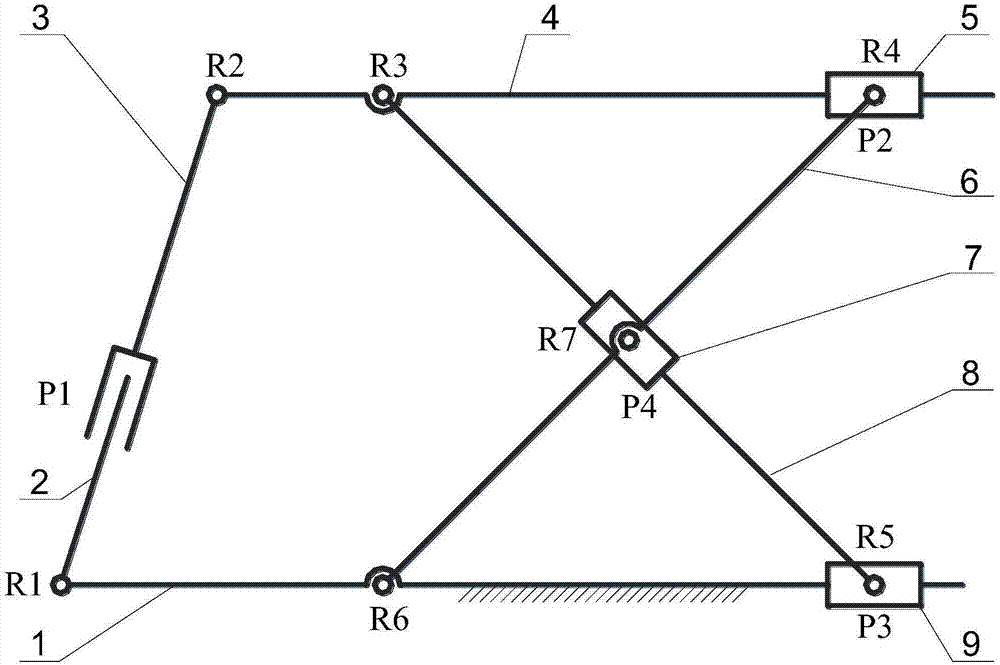
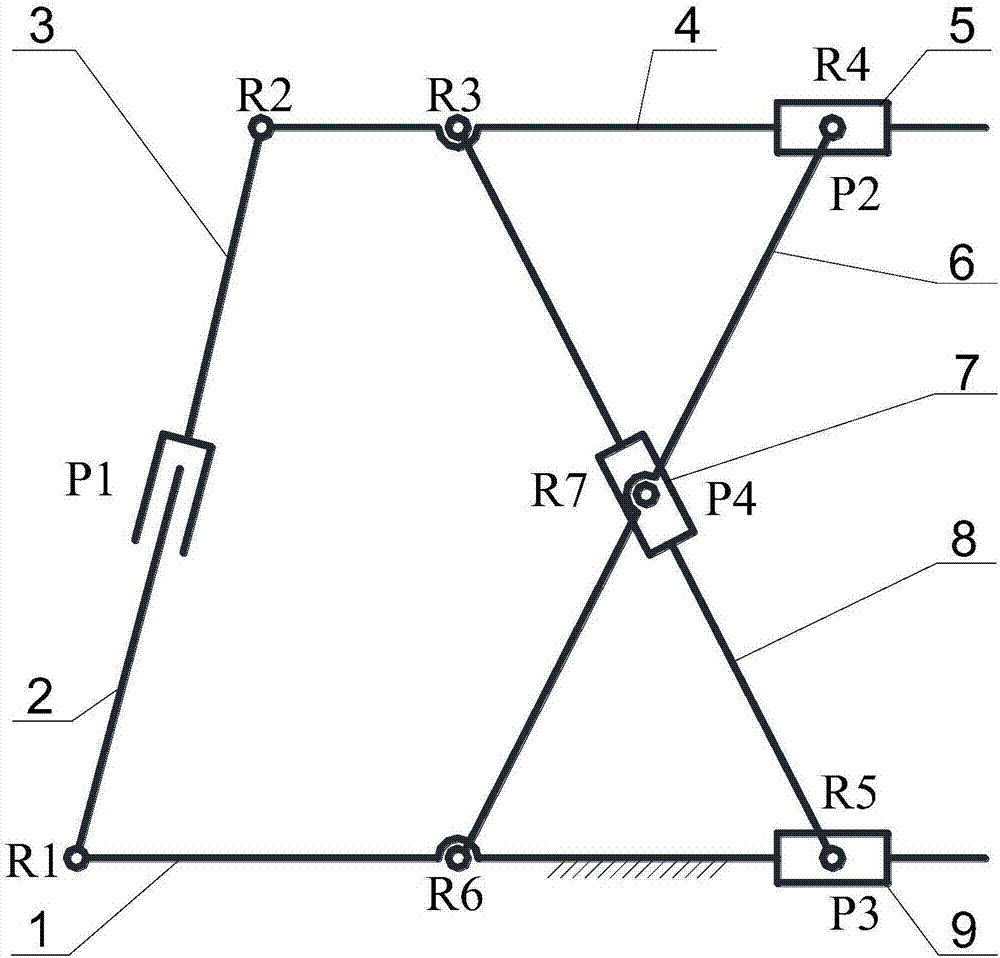
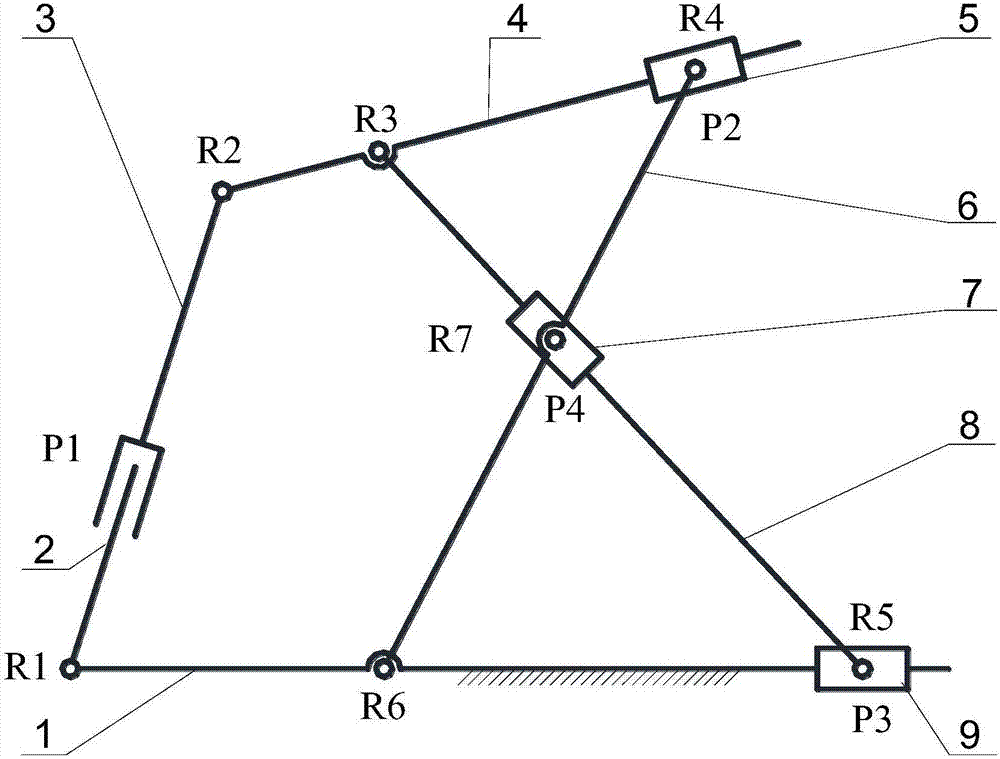
[0015] exist Figure 1-3 In the schematic diagram of the planar two-degree-of-freedom parallel mechanism with coupling branches shown, the first connecting rod 1 is a fixed connecting rod, the fourth connecting rod 4 is an end effector, and one end of the first connecting rod connects with the second One end of the connecting rod 2 is connected, the other end of the first connecting rod 1 is provided with a first slide block 9 to form a moving pair P3, the other end of the second connecting rod is connected with one end of the third connecting rod 3 through a moving pair P1, and the third The other end of the connecting rod is connected to one end of the fourth connecting rod 4 through the rotating pair R2, the other end of the fourth connecting rod is provided with a second slider 5 to form a moving pair P2, and one end of the fifth connecting rod 6 is connected to the fourth connecting rod through the rotating pair R4. The second slider is connected, the other end of the fif...
Embodiment 2
[0024] The central portion of the fifth connecting rod is provided with a third slider 7 to form a moving pair P4, and the central portion of the sixth connecting rod is connected to the third sliding block through a rotating pair R7; other components and connections are the same as those in Embodiment 1.
[0025] The embodiment of the present invention can also be used to carry goods, and the loading platform or the loading box is arranged on the fourth connecting rod 4 to realize the transfer and dumping of the goods.
[0026] It can be seen that the present invention can select any two sliders as input, and according to the difference of the selected input sliders and the direction of the input motion, a variety of different motion trajectories and motion results can be obtained, which can meet the needs of various occasions , this mechanism can be widely promoted and applied.
[0027] In order to increase the stability and rigidity of the fixed link, multiple planar two-de...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More