

3D obstacle avoidance indoor robot navigation method and system
An indoor robot and navigation method technology, applied in the field of indoor robot navigation methods and systems, can solve problems such as difficulty in robots and difficulty in ensuring information accuracy, and achieve the effects of convenient collection and single data form
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] In order to make the object, technical solution and advantages of the present invention more clear, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention. In addition, the technical features involved in the various embodiments of the present invention described below can be combined with each other as long as they do not constitute a conflict with each other.
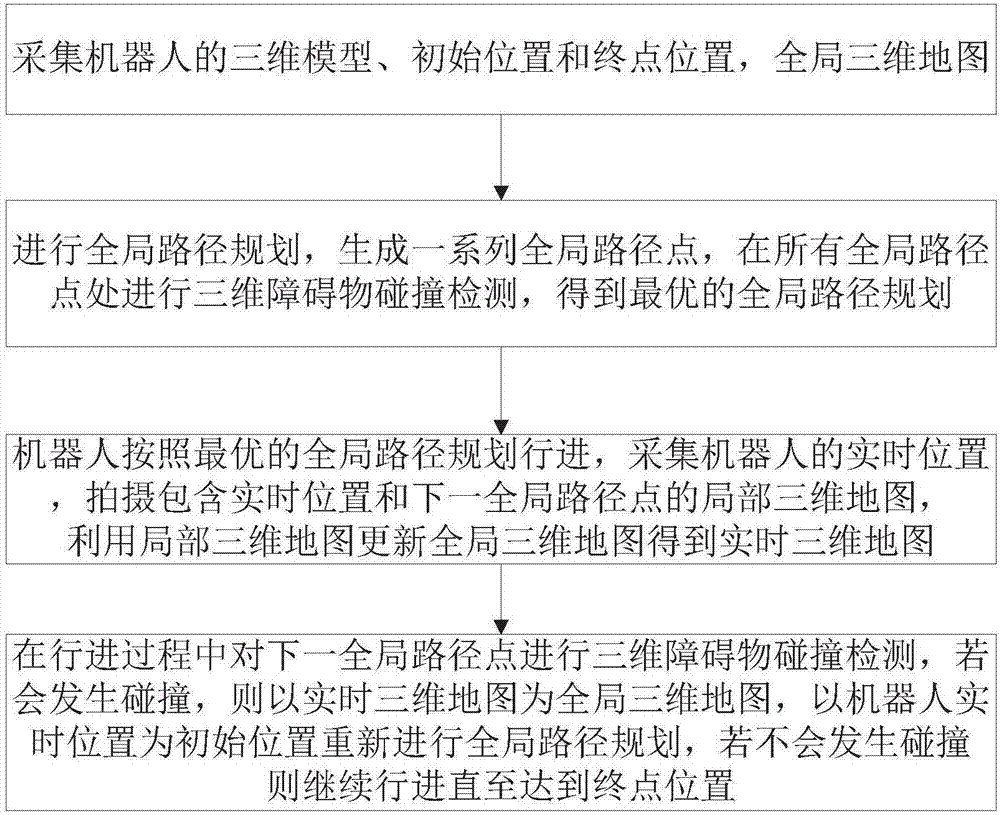
[0030] like figure 1 As shown, the indoor robot navigation method of a kind of three-dimensional obstacle avoidance provided by the present invention comprises the following steps:
[0031] (1) Collect the 3D model of the robot, the initial position and the end position of the robot, and the global 3D map including the initial position and the end position;
[0032] (2) Carry out global pat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More