

Target tracking method based on application of unmanned boat
A technology for target tracking and unmanned boats, which is applied in the field of long-term stable tracking of targets based on unmanned boat applications, and can solve problems such as limiting the scope of application, difficulty in applying automatic obstacle avoidance for unmanned boats, and high algorithm complexity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0041] In order to facilitate the understanding of those skilled in the art, the present invention will be further described below in conjunction with the accompanying drawings.
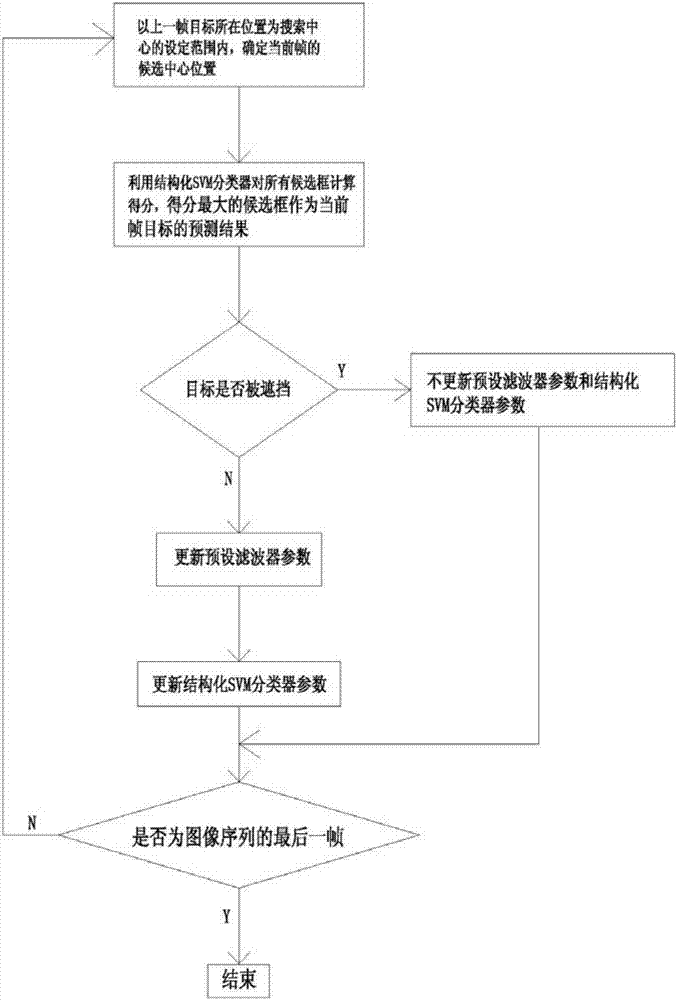
[0042] as attached figure 1 Shown, the present invention discloses a kind of surface target tracking method based on unmanned boat application, comprises the following steps:
[0043] S1, acquire the image sequence of the target, and use the preset filter f(z)=W within the setting range where the target position in the previous frame is the search center T Z, Z is the feature vector of the sample, W is the weight vector, and the maximum response position is searched, and the maximum response position is used as the candidate position center of the target in the current frame.
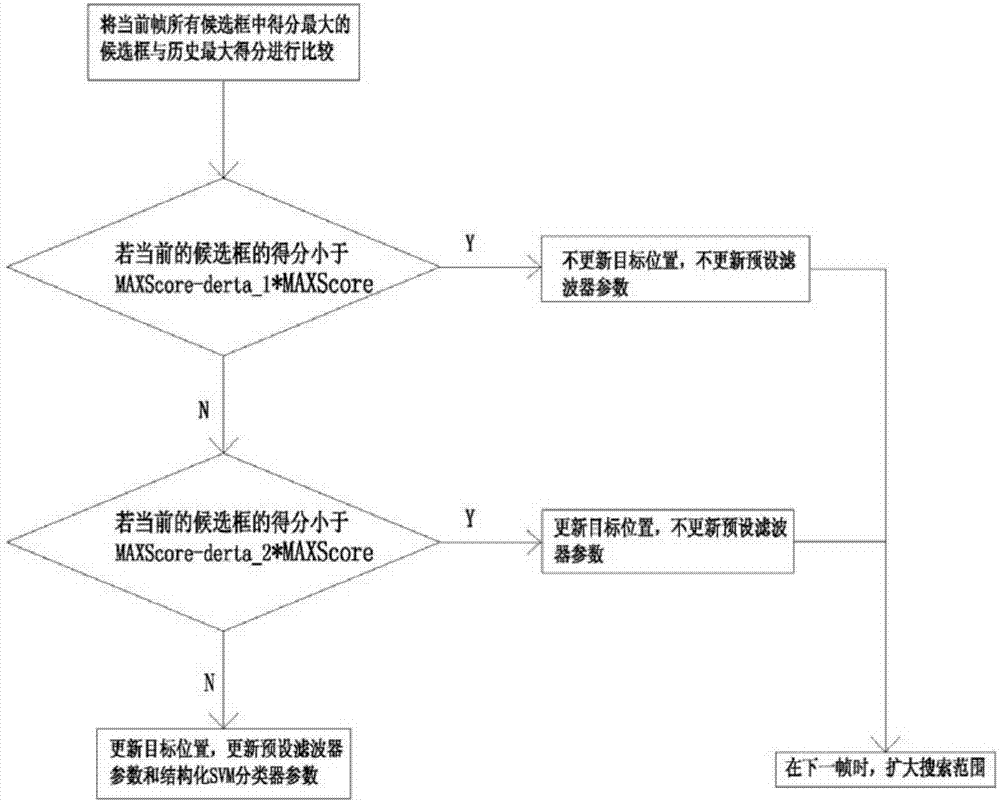
[0044] S2, use multi-scale sliding window sampling around the center of the candidate position to obtain several candidate frames, use the structured SVM classifier to calculate scores for all candidate frames, and use the ca...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More