

Automatic transport vehicle system with robotic arm and control method thereof, and robot system
A technology of automatic transport vehicles and robot arms, which is applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., and can solve the problems of restrictions, low degrees of freedom, and low moving accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
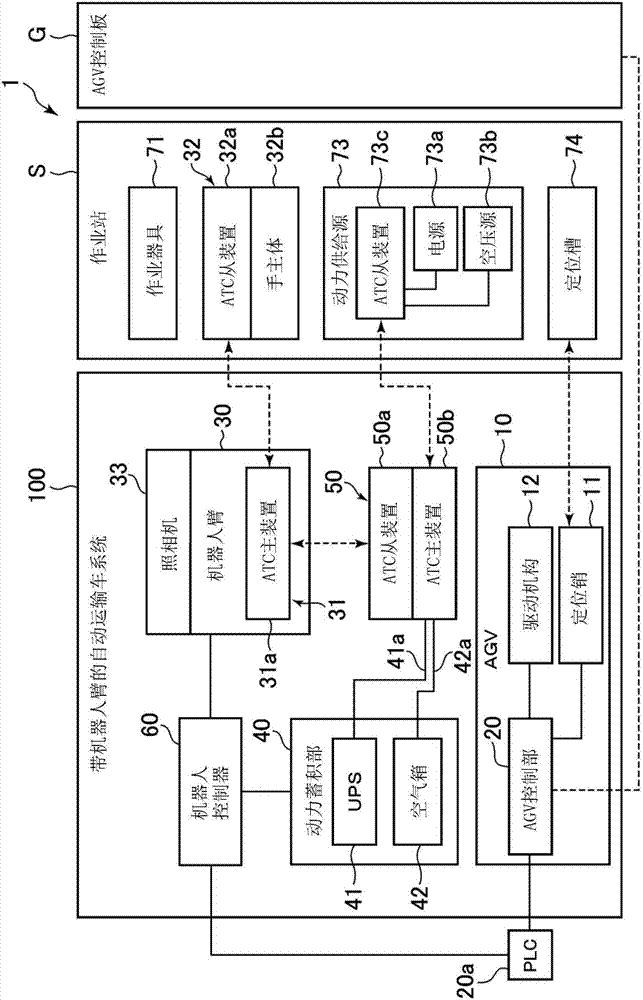
[0033] First, refer to figure 1 , the outline of the overall configuration of the robot system according to the embodiment of the present invention (hereinafter referred to as the present embodiment) will be described. figure 1 It is a block diagram showing the physical system configuration of the robot system of this embodiment. The robot system 1 includes an automatic transport vehicle system 100 with a robot arm, a work station S and an AGV control panel G. In this figure, physical connections such as wired connections and piping are indicated by solid lines, non-contact communications such as wireless connections are indicated by dotted lines, and detachable connection relationships are indicated by dotted double arrows.
[0034] In the automatic transport vehicle system 100 with a robot arm, the robot arm 30 is operably mounted on an AGV (Automatic Guided Vehicle: automatic guided vehicle) 10 . The AGV 10 includes an AGV control unit 20 for controlling the operation of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More