

A marking point positioning method combining laser ranging and binocular camera
A binocular camera and laser ranging technology, applied in the field of computer vision, can solve the problem of low long-distance positioning accuracy of binocular stereo vision, and achieve the effect of improving three-dimensional positioning accuracy and high-precision three-dimensional positioning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The technical solutions of the present invention will be described in further detail below with reference to the accompanying drawings and embodiments.
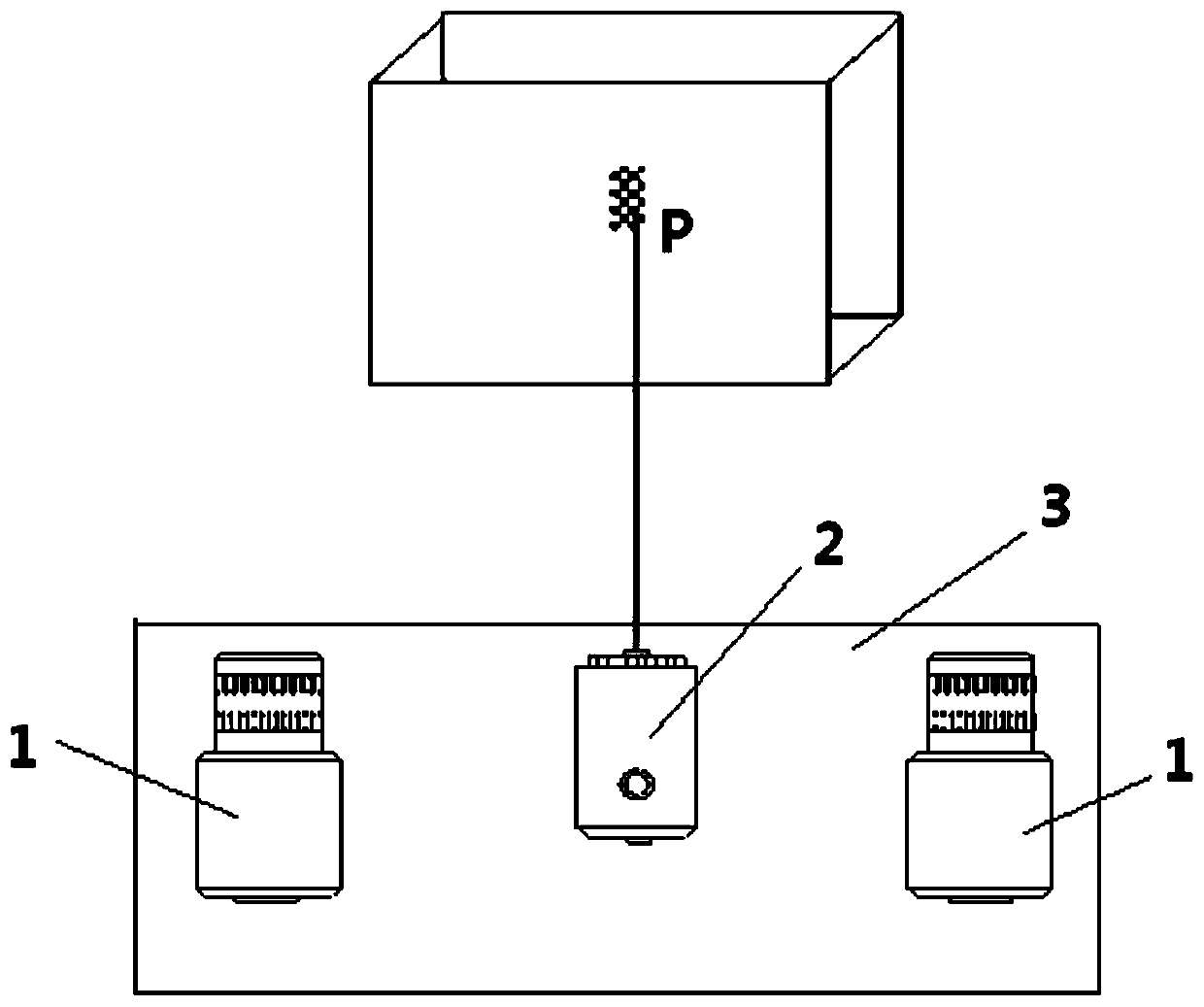
[0024] The invention provides a marking point positioning method combining laser ranging and binocular camera, such as figure 1 Shown is a high-precision cooperative marker point positioning device combined with a binocular camera 1 and a laser rangefinder 2. The laser rangefinder 2 is located in the middle of the baseline of the binocular camera 1, and the entire device is located on a high-precision mobile platform 3, which can realize The diagram shows the high-precision movement in the x-direction and direction. There are checkerboard markers on the target object, and the relative positions of the marker points and the target object are known.
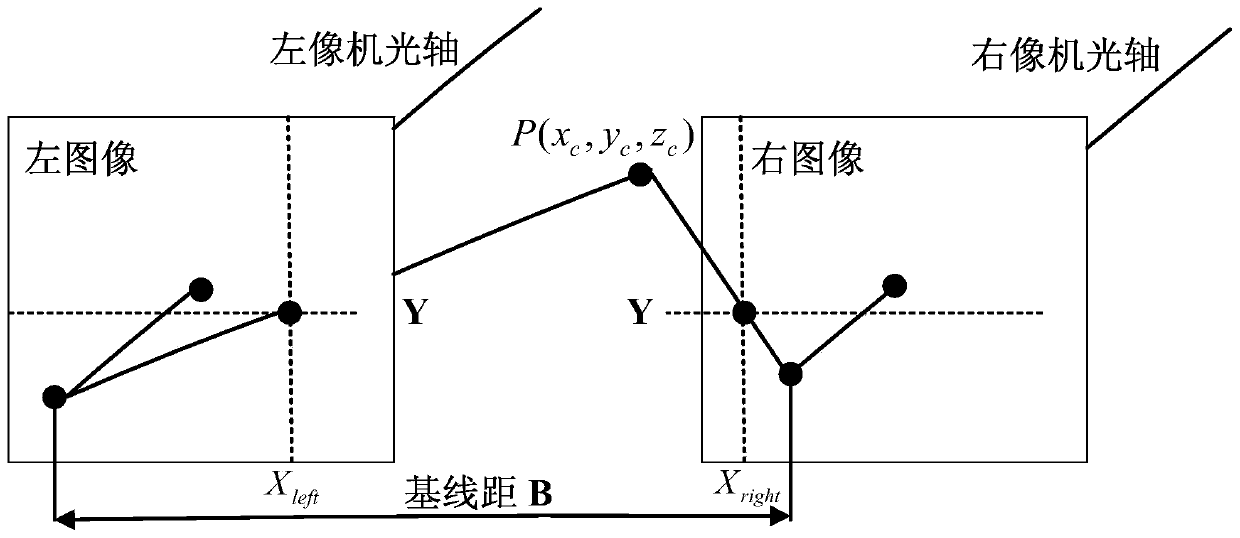
[0025] The three-dimensional reconstruction principle of binocular stereo vision is as follows: figure 2 As shown, the horizontal direction is defined as the X axis, and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More