

Swimming and walking combined underwater operation robot and control method thereof
An underwater operation and robot technology, applied in the direction of program control manipulators, manipulators, motor vehicles, etc., can solve the problems of heavy weight and poor navigation stability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0056] Embodiment 1: A walking hybrid underwater working robot using bionic blade legs and its control method
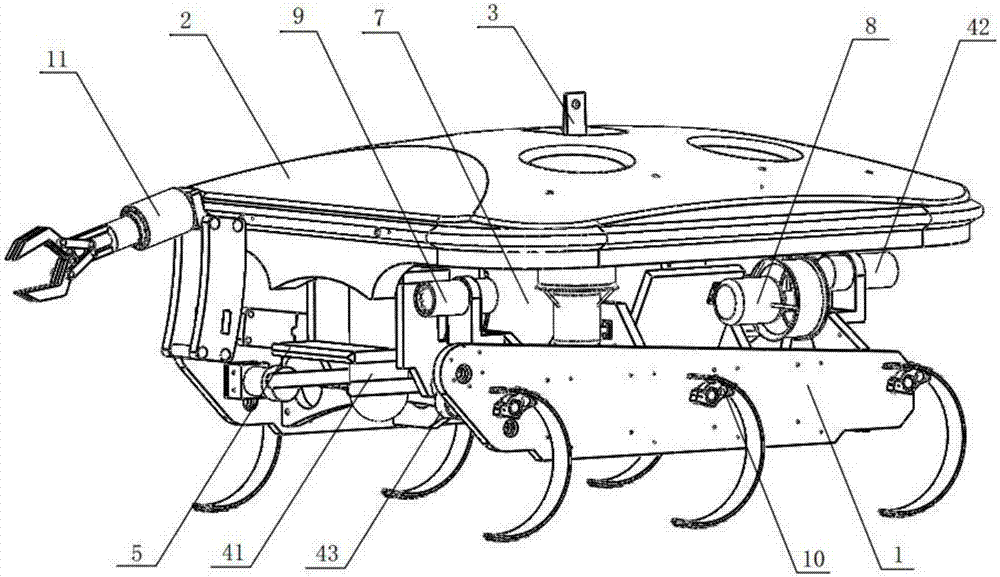
[0057] Refer to attached figure 1 , a walking mixed underwater robot is characterized in that: it comprises a polypropylene frame (1), a floating body module (2), a steel hanger (3), a camera and lighting device, a front-view image sonar (5), Depth and height integrated sensor (6), control sealed cabin (7), swimming driving device (8), binocular vision positioning device (9), walking and driving device (10), and operation expansion module (11), etc. .
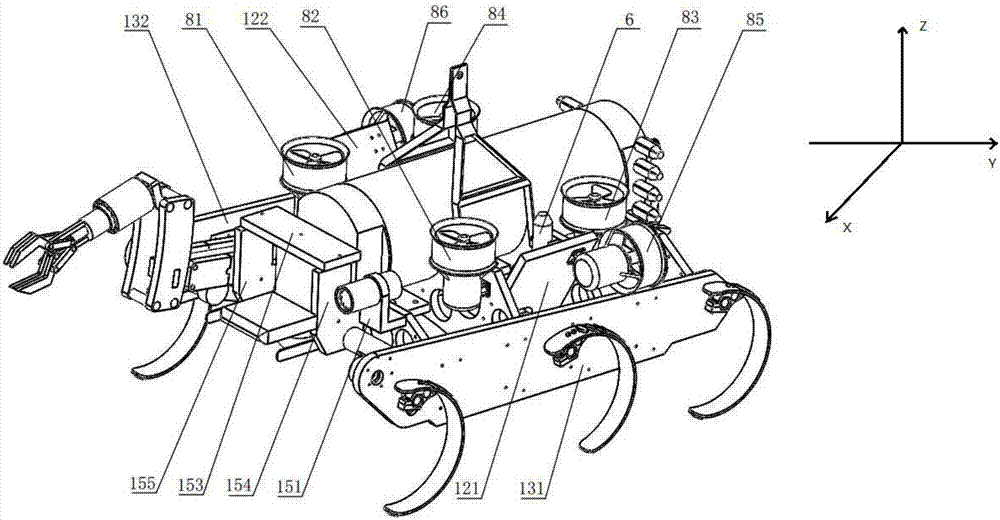
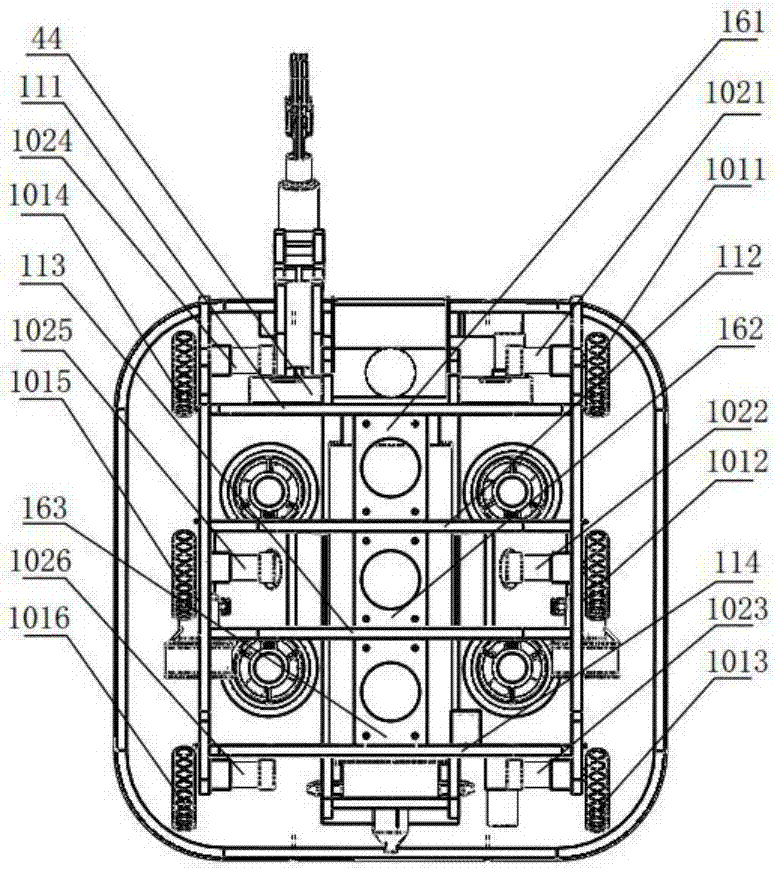
[0058] Refer to attached figure 2 and 3 , the polypropylene frame (1) is a polypropylene material, the main body consists of four beams (111, 112, 113, 114), two propeller support plates (121, 122), two side plates (131, 132) , control the parts such as the rear baffle plate of the sealed compartment, the positioning device support (151) and the camera support (153, 154, 155). The four beams (111, 112, 113, 114)...
Embodiment 2
[0074] Embodiment 2: An underwater working robot and its control method adopting omnidirectional wheel walking and mixing
[0075] Refer to attached figure 1 , a walking mixed underwater robot is characterized in that: it comprises a polypropylene frame (1), a floating body module (2), a steel hanger (3), a camera and lighting device, a front-view image sonar (5), Depth and height integrated sensor (6), control sealed cabin (7), swimming driving device (8), binocular vision positioning device (9), walking and driving device (10), and operation expansion module (12), etc. . Refer to attached Figure 8 , except that the side panels (133, 134) of the polypropylene frame, the walking and driving device (10) and the operation expansion module (12) are identical to the first embodiment.
[0076] The polypropylene frame (1) is made of polypropylene material, and the main body consists of four beams (111, 112, 113, 114), two propeller support plates (121, 122), two side plates (133...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More