

LiDAR-based obstacle avoidance steering device, working method and carbon-free car
A steering device and obstacle avoidance technology, which is applied to toy cars, toy transmission, toys, etc., can solve the problems of insensitive car steering, large influence on the machining accuracy of parts, and difficulty in machining, and meet the requirements of improving energy utilization efficiency and machining accuracy. Not high, the effect of ensuring stable and reliable performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
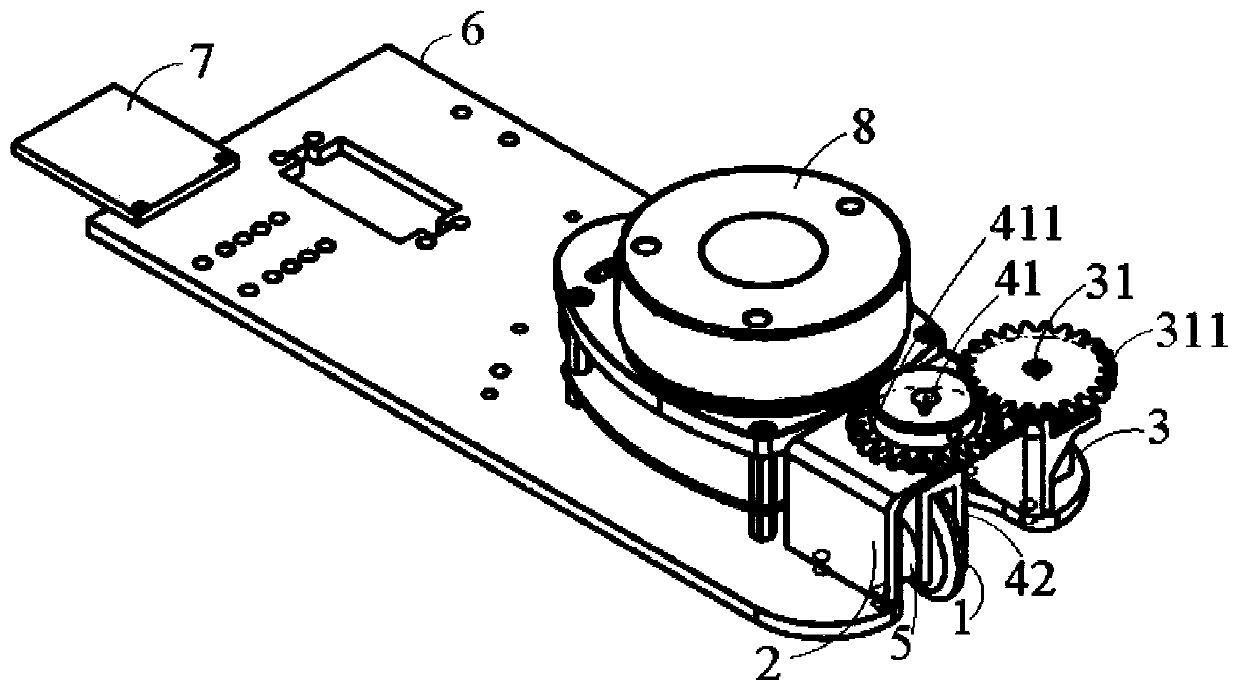
[0057] figure 1 It is the structural diagram of the obstacle avoidance steering device based on lidar;
[0058] Such as figure 1 As shown, this embodiment 1 provides an obstacle avoidance steering device, which is suitable for a carbon-free car. The specific structure includes: a control unit and a steering mechanism located on the vehicle body; wherein the control unit is suitable for detecting obstacles and driving steering The mechanism enables the car to realize automatic obstacle avoidance walking.
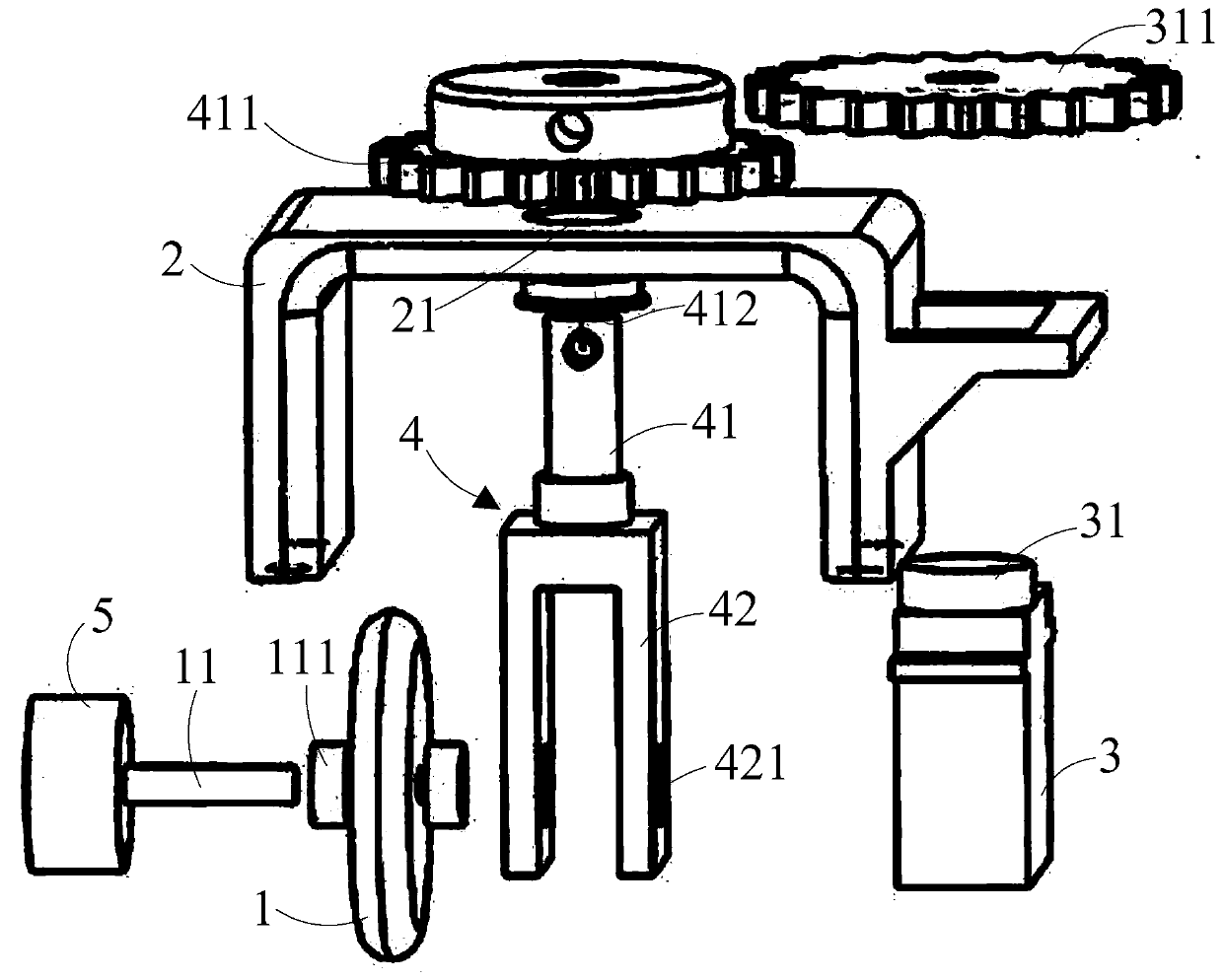
[0059] figure 2 It is the structural diagram of the steering mechanism of the obstacle avoidance steering device based on lidar;
[0060] Such as figure 1 and figure 2 As shown, the steering mechanism includes: steering front wheels 1 and a steering base 2 located at the front of the vehicle body floor 6, and a steering gear 3 on one side of the steering base 2; A through hole 21 is established; the top of a front fork 4 passes through the through hole 21 and is conne...
Embodiment 2
[0069] On the basis of Embodiment 1, Embodiment 2 provides a working method of an obstacle avoidance steering device.
[0070] Wherein, the obstacle avoidance steering device includes: a control unit, and a steering mechanism located on the vehicle body; and the specific structure and working principle refer to the relevant description of Embodiment 1, which will not be repeated here.
[0071] The working method includes: detecting obstacles through a control unit and driving a steering mechanism so that the trolley automatically avoids obstacles and walks.
[0072] The automatic obstacle avoidance walking mode includes: steering, U-turn and straight line correction.
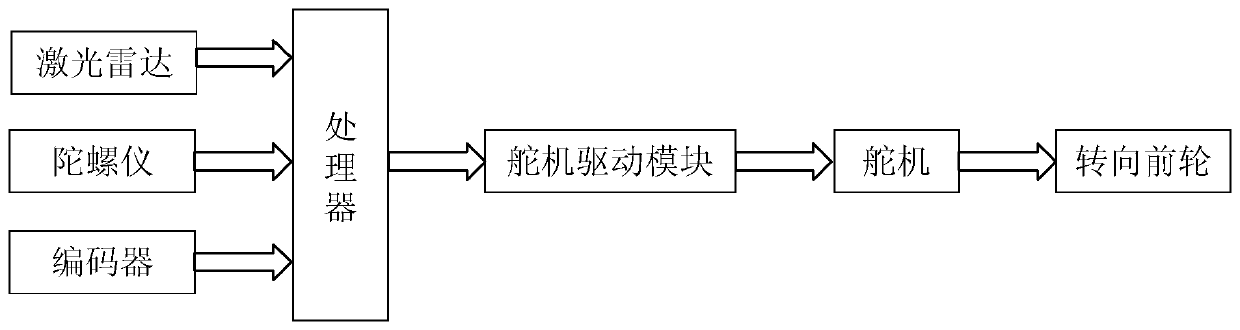
[0073] In the embodiment, the steering and U-turn processes are similar, specifically, the processor module 7 collects and analyzes the signals of the gyroscope, the laser radar 8 and the photoelectric encoder to control the steering mechanism.
[0074] When an obstacle appears directly in front of the vehicle ...
Embodiment 3
[0079] On the basis of Embodiment 1, Embodiment 3 also provides a carbon-free trolley equipped with the obstacle avoidance steering device as described in Embodiment 1.
[0080] Specifically, the specific structure and working principle of the obstacle-avoiding steering device are as described in Embodiment 1. The automatic obstacle-avoiding walking mode of the trolley by the obstacle-avoiding steering device includes: steering, U-turn and straight line correction instructions.
[0081] The specific process of the above steering, U-turn and straight line correction commands is as described in Embodiment 2, and will not be repeated here.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More