

Fuzzy adaptive compensation control method in performer time lag and failure
A fuzzy self-adaptive and compensation control technology, applied in the field of robotics, to achieve the effect of ensuring stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without creative efforts fall within the protection scope of the present invention.
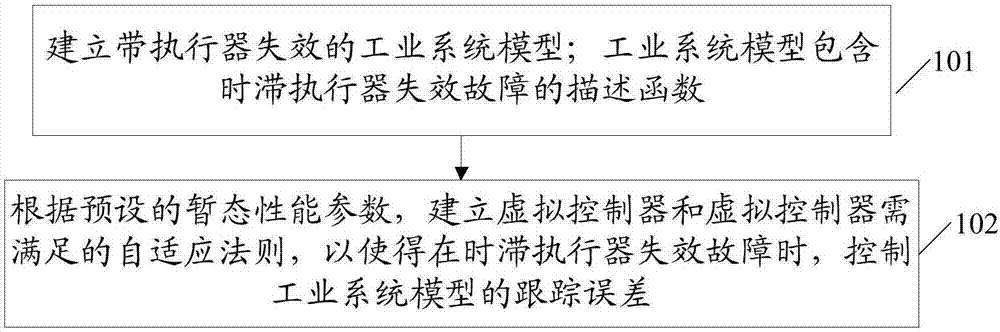
[0028] see figure 1 , is a schematic flow chart of an embodiment of the fuzzy adaptive compensation control method for actuator time lag and failure provided by the present invention, including steps 101 to 102, and each step is specifically as follows:
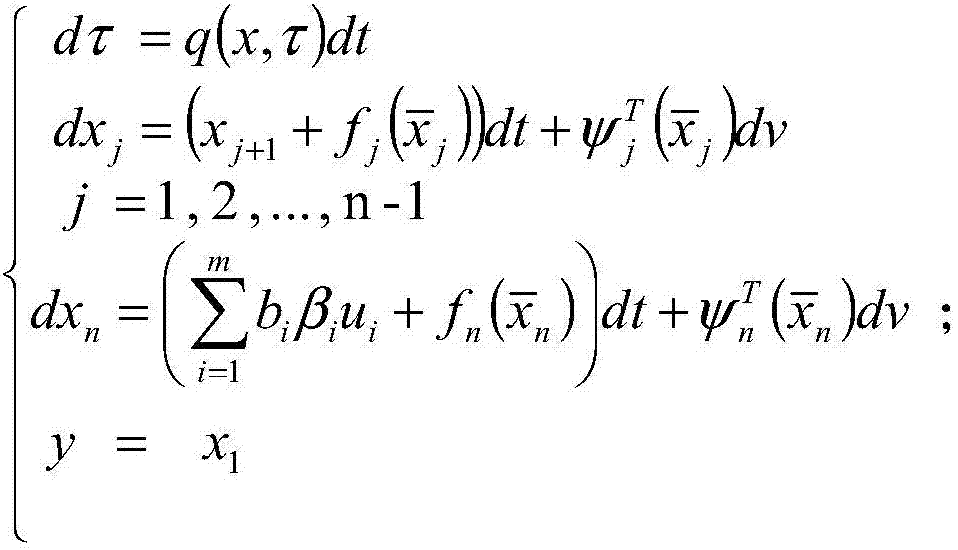
[0029] Step 101: Establish an industrial system model with actuator failure; the industrial system model includes a description function of the time-delay actuator failure fault.
[0030] In this embodiment, the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More