

Method for perspective perception of intelligent vehicle front road environment on basis of V2V
A road environment and intelligent vehicle technology, applied in the field of intelligent transportation, can solve the problems of obscured road targets not being able to perceive, rear-end collisions, etc., and achieve the effect of improving safe driving ability and wide application scenarios.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] In order to make the purpose, technical solution and advantages of the present invention clearer, the embodiments of the present invention will be further described below in conjunction with the accompanying drawings.
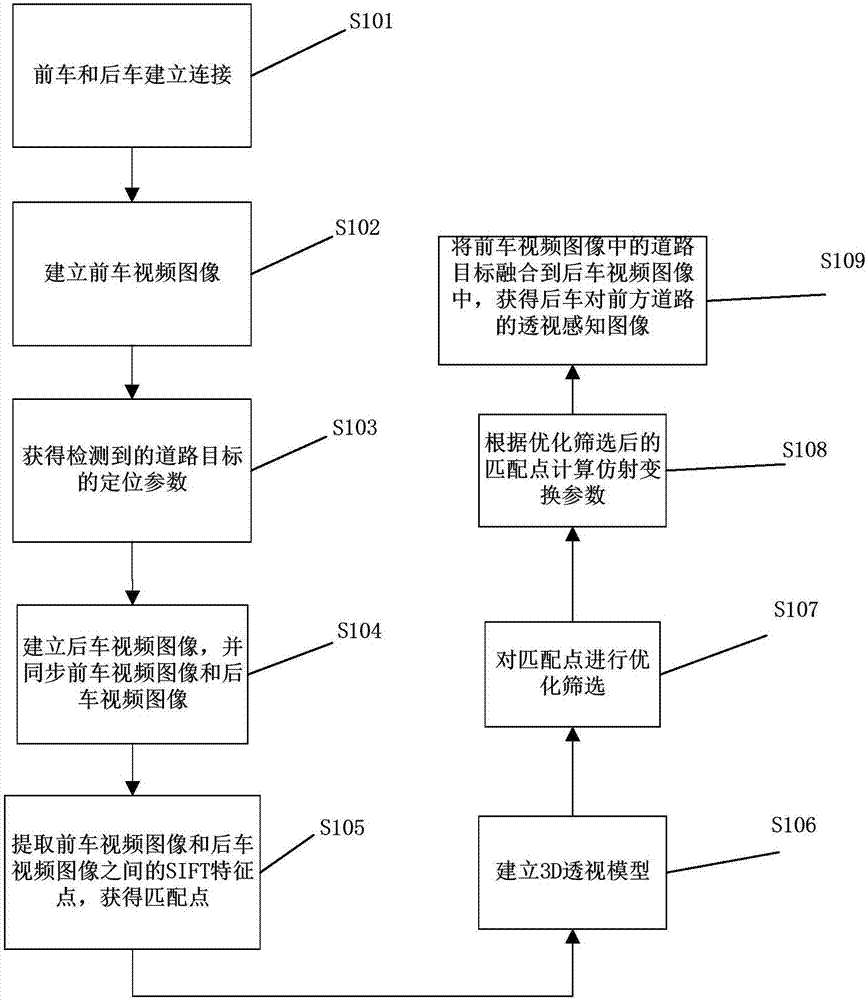
[0051] refer to figure 1 , an embodiment of the present invention provides a V2V-based method for perspective perception of the road environment ahead of an intelligent vehicle, comprising the following steps:
[0052] S101. Obtain two vehicles that are close to each other during driving on the road. The two vehicles are divided into a front vehicle and a rear vehicle, and the rear vehicle is located behind the front vehicle. The front vehicle and the rear vehicle are connected through a cooperative communication protocol.
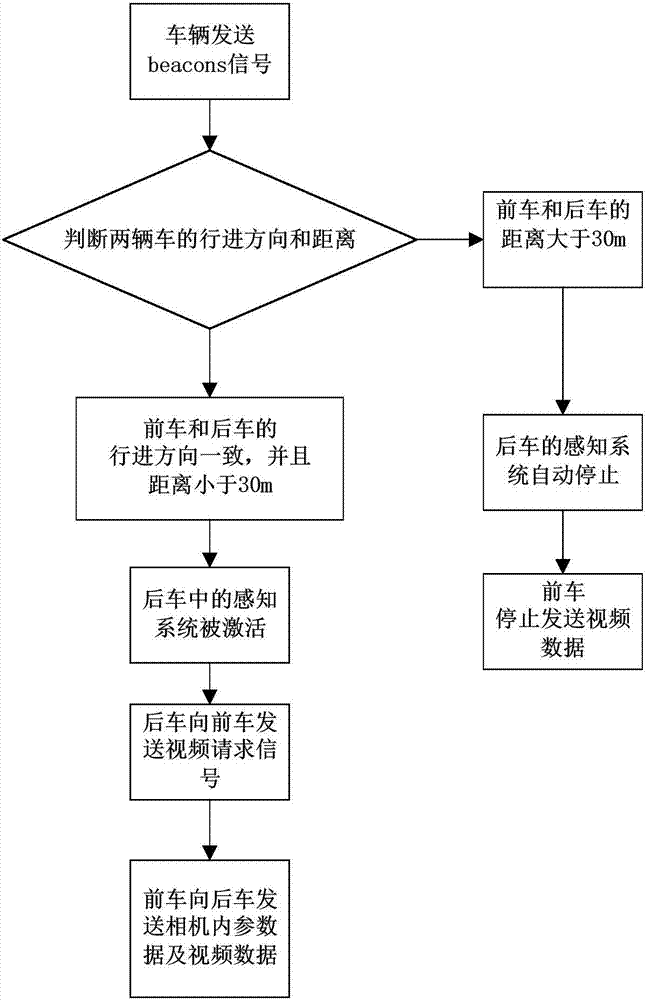
[0053] refer to figure 2 , the specific process of establishing a connection between the front vehicle and the rear vehicle through the cooperative communication protocol is:
[0054] The vehicle in the process of driving periodic...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More