

A method for attitude control of non-cooperative target assembly spacecraft
A non-cooperative target and attitude control technology, applied in the field of on-orbit operation of non-cooperative targets in space, can solve problems such as uncertain recognition of target spacecraft, sudden changes in the assembly, and difficulty in controlling the assembly
Active Publication Date: 2016-09-07
SHANGHAI XINYUE METER FACTORY
View PDF0 Cites 13 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
After the in-orbit operating vehicle captures the non-cooperative target, the configuration and mass characteristic parameters have changed greatly compared with before, which brings great difficulties to the control of the assembly
First of all, the uncertainty of the knowledge of the target spacecraft, as well as some load or configuration changes caused by the spacecraft’s in-orbit operation, make these quality characteristic parameters unable to be calculated by means of ground experiments.
Secondly, the space target spacecraft often has a certain speed of motion, and the momentum of the assembly will change suddenly after docking or capture, which may cause the instability of the base
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples

Examples
Experimental program
Comparison scheme
Effect test
Embodiment Construction
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
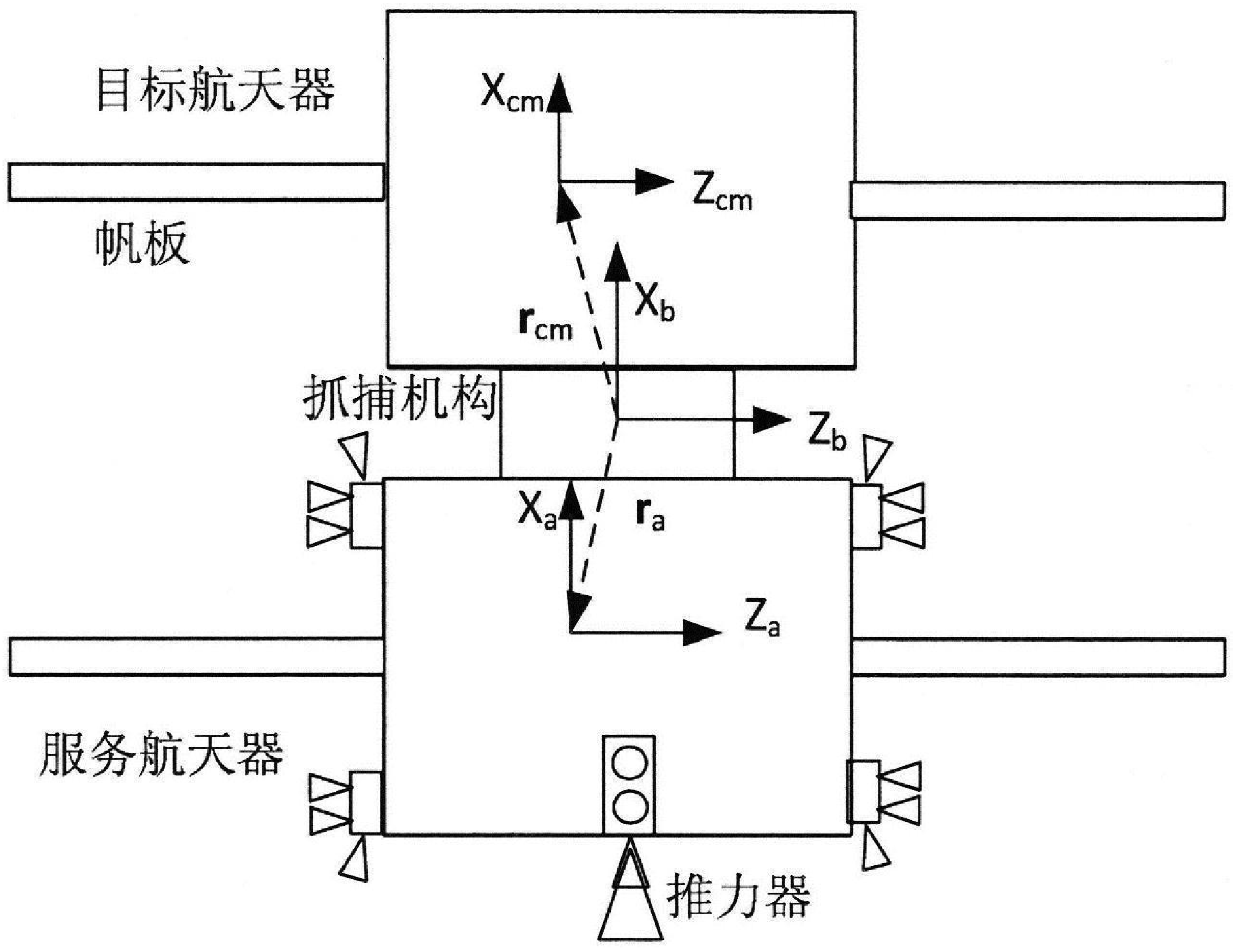
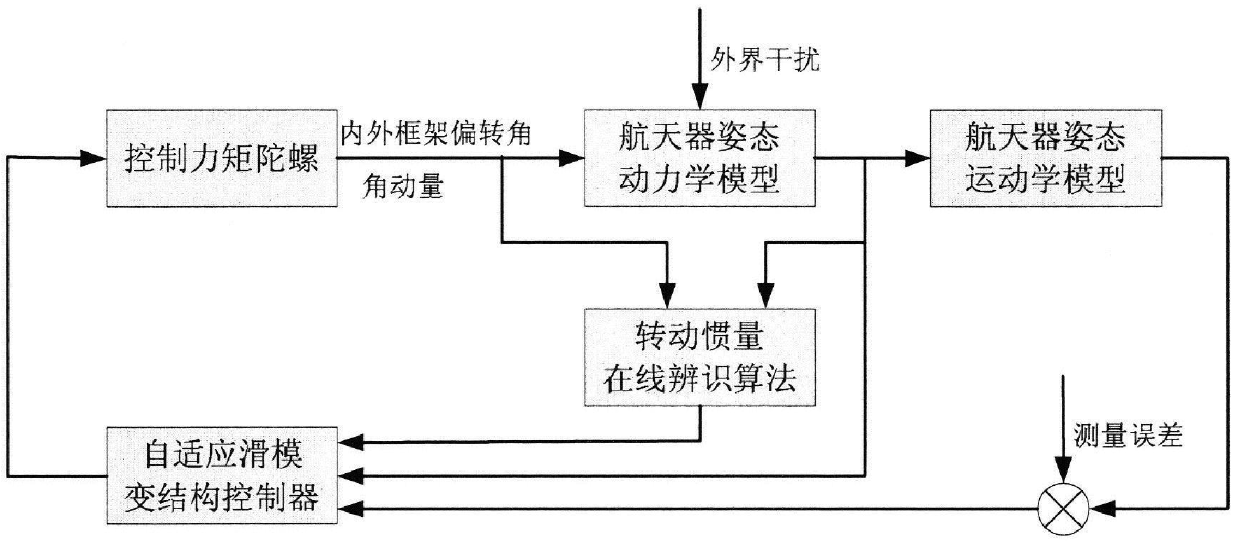
The invention provides a non-cooperative target assembly spacecraft attitude control method, which includes the steps of: redefining the coordinate system of the assembly spacecraft; on-orbit identification of the assembly moment of inertia; and an algorithm for the attitude control of the assembly spacecraft ; The present invention uses the moment of inertia on-orbit identification algorithm with good real-time performance, high identification accuracy, easy engineering implementation, and provides reliable parameter basis for controller design; for the problems of uncertain parameters and large external disturbance torque, the self-adaptive sliding mode controller is used Through appropriate initial parameters, the attitude stabilization control of the combined spacecraft is realized.
Description
technical field The invention relates to a spacecraft attitude control technology, in particular to an on-orbit operation method for a space non-cooperative target. Background technique With the improvement of space research and application capabilities, the demand for space on-orbit operation technology is increasingly urgent. All space powers have realized its importance, and have carried out corresponding research plans around the future on-orbit operation system. These studies can be used It is used for tasks such as clearing orbital garbage and on-orbit maintenance. The targets of the research include fuel-exhausted satellites, space debris, abandoned satellites, etc. The combination of these target spacecraft and active spacecraft is not like a large-scale combination such as a space station, whose parameters can be obtained in advance through ground experiments. Therefore, in-orbit The research on the control method of combined spacecraft under the background of serv...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More Patent Type & AuthorityPatents(China)
IPC IPC(8): G05D1/08
Inventor刘超镇卢山孙玥贺亮刘宗明李剑
OwnerSHANGHAI XINYUE METER FACTORY