

Automatic landing method of unmanned aerial vehicle based on visual guidance
An automatic landing, vision-guided technology, applied in the field of drones and machine vision, can solve the problems of inability to achieve precise landing of drones, unsuitable for loading, and high price, and achieve the goal of improving intelligence, improving accuracy, and reducing interference. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
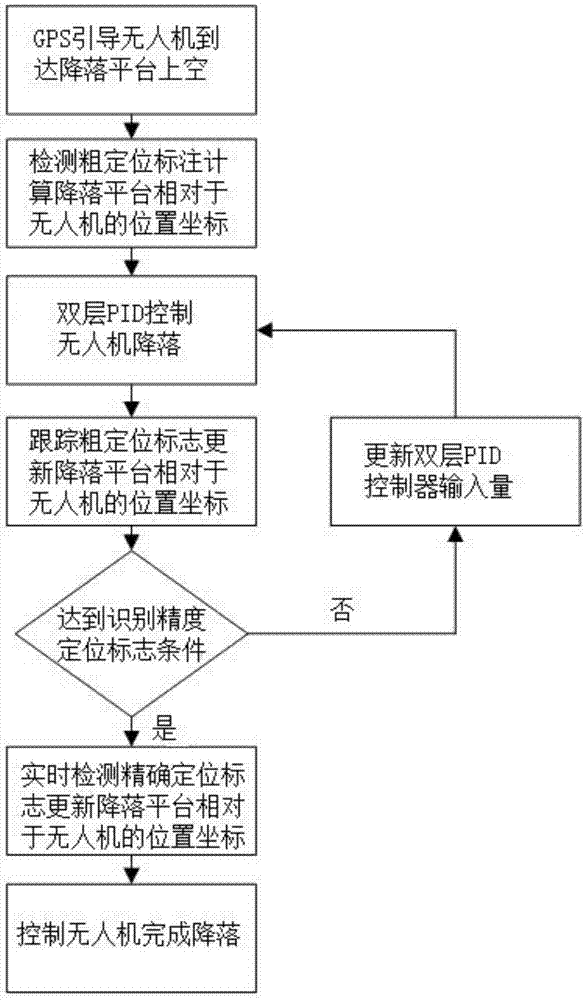
[0053] In order to improve the accuracy of the autonomous landing of UAVs, the present invention provides a method for automatic landing of UAVs based on vision guidance, such as figure 1 Shown, the realization steps of the present invention are as follows:
[0054] Including the following steps:
[0055] Step 1) According to the GPS information of the landing platform, guide the UAV to enter the sky above the landing platform through GPS navigation, and then lower the height of the UAV so that the UAV hovers at a distance of 10-15m from the ground;
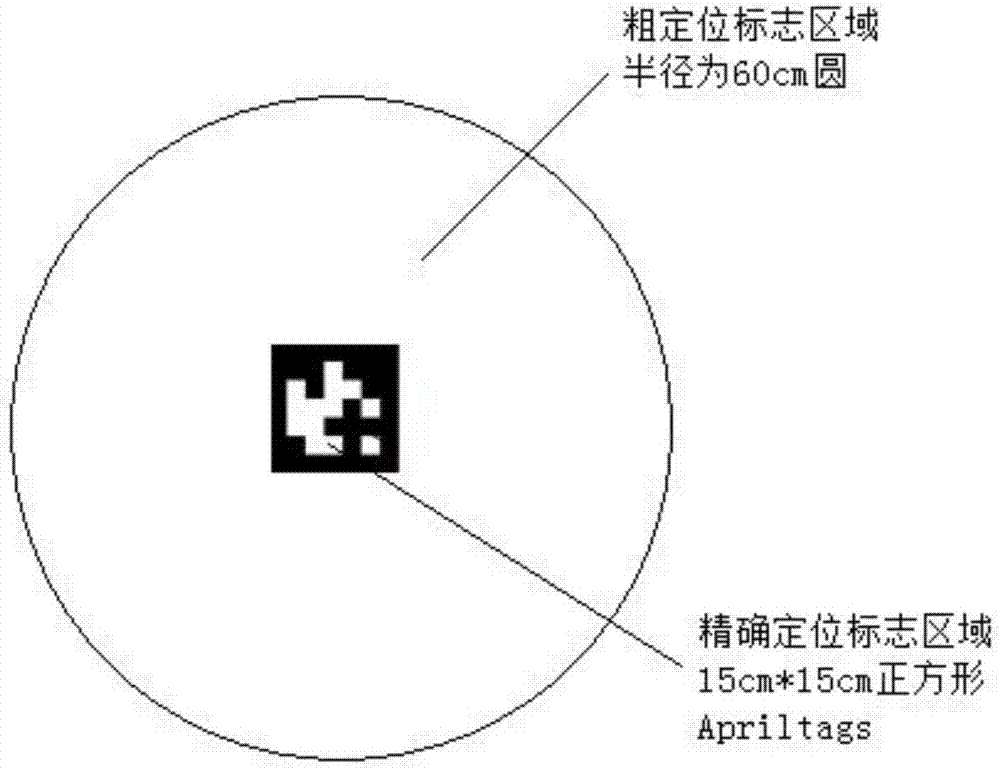
[0056] Among them, the landing platform is a plane marked with a landing sign, such as figure 2 As shown, the landing mark is composed of a precise positioning mark and a coarse positioning mark at the same point in the center, the precise positioning mark is a square Apriltags with a side length of 15cm, and the rough positioning mark is the area between the circle and the Apriltags with a radius of 60cm, The coarse locator a...
Embodiment 2
[0082] In order to verify the effectiveness and feasibility of the present invention, this example controls the UAV to hover at a height of 12m from the ground, and then performs the autonomous landing of the UAV under visual guidance. In the initial state, the coarse positioning detected by the UAV signs such as Figure 5a , Figure 5b , Figure 5c shown, where Figure 5a Images captured by drone cameras, Figure 5b is the area where the rough positioning mark is located after the binarized image, Figure 5c The box in represents the area of the detected coarse positioning mark. The center coordinates of the landing platform calculated by the coarse positioning mark are: (252, 341) in pixels, and the calculated position coordinates of the landing platform relative to the UAV (X, Y , h) is: (4.2, 1.9, 12) and the unit is m.
[0083] During the landing process of the UAV, the coarse positioning mark is automatically tracked, and the position coordinates (X, Y, h) of the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More