

Encircling and tracking method based on distributed control unmanned surface vessel cluster
A distributed control and unmanned boat technology, which is applied in the field of unmanned boat formation control, can solve the problems of difficulty in rounding up enemy ships and unfixed movement patterns of enemy ships, and achieve high efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0051] In order to facilitate the understanding of those skilled in the art, the present invention will be further described below in conjunction with the embodiments and accompanying drawings, and the contents mentioned in the implementation modes are not intended to limit the present invention.
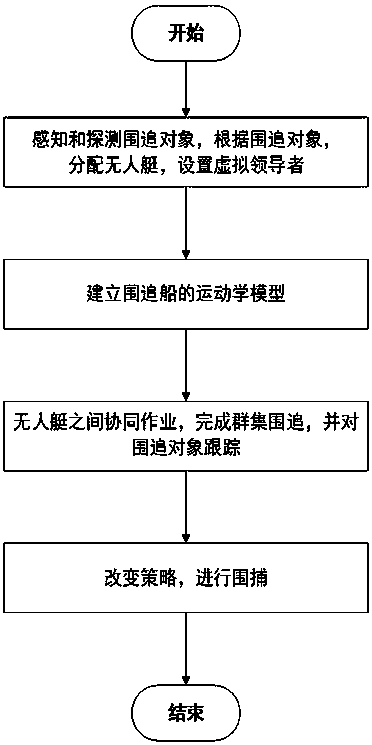
[0052] This embodiment provides a method for distributed control of unmanned boat swarm tracking, including:
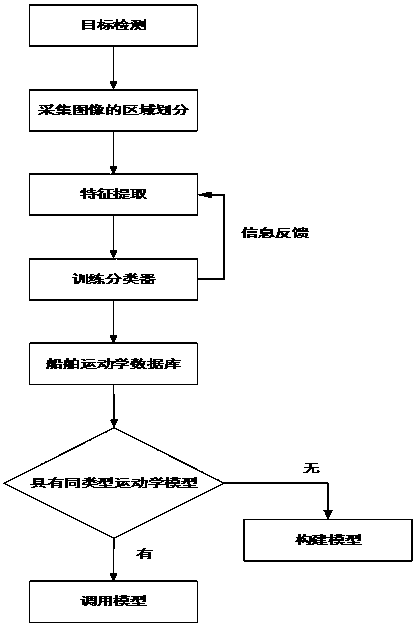
[0053] Such as figure 1, to perceive and detect the chasing objects, allocate unmanned boats according to the number of chasing objects, and set up a virtual leader. It involves the use of multi-source data processing and fusion technology, environment perception based on image information, and the method of target detection and selection to perform environmental analysis and target recognition in the target area. For scene analysis in complex environments, the pictures are divided into many small pictures for analysis after taking pictures, and the areas with the same col...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More