

Three-degree-of-freedom grabbing mechanical arm for detecting platform
A technology for grasping a manipulator and a detection platform, applied in the field of manipulators, can solve the problems of low detection efficiency and high labor intensity, and achieve the effects of sensitive movement, simple structure and high control precision.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
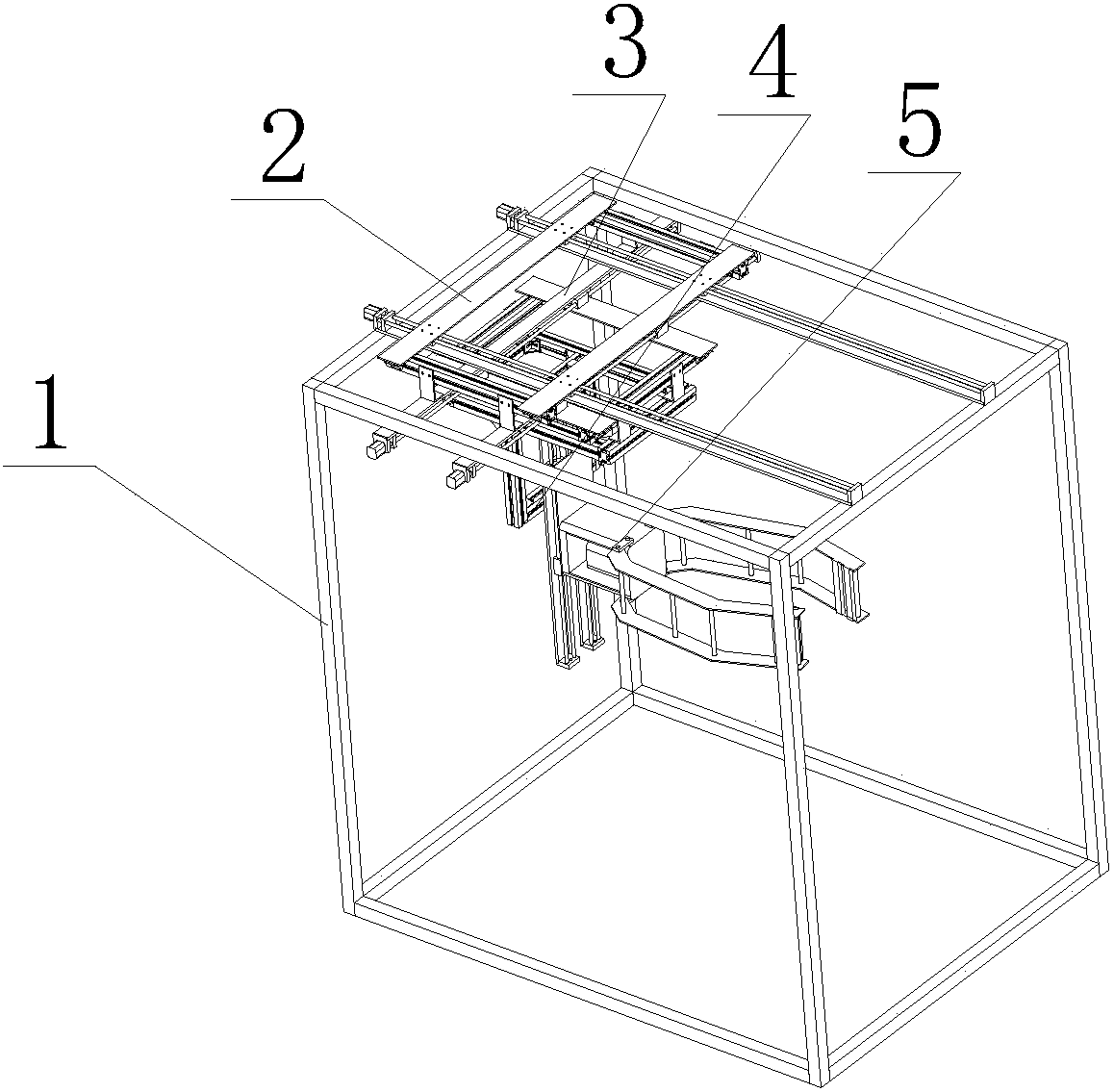
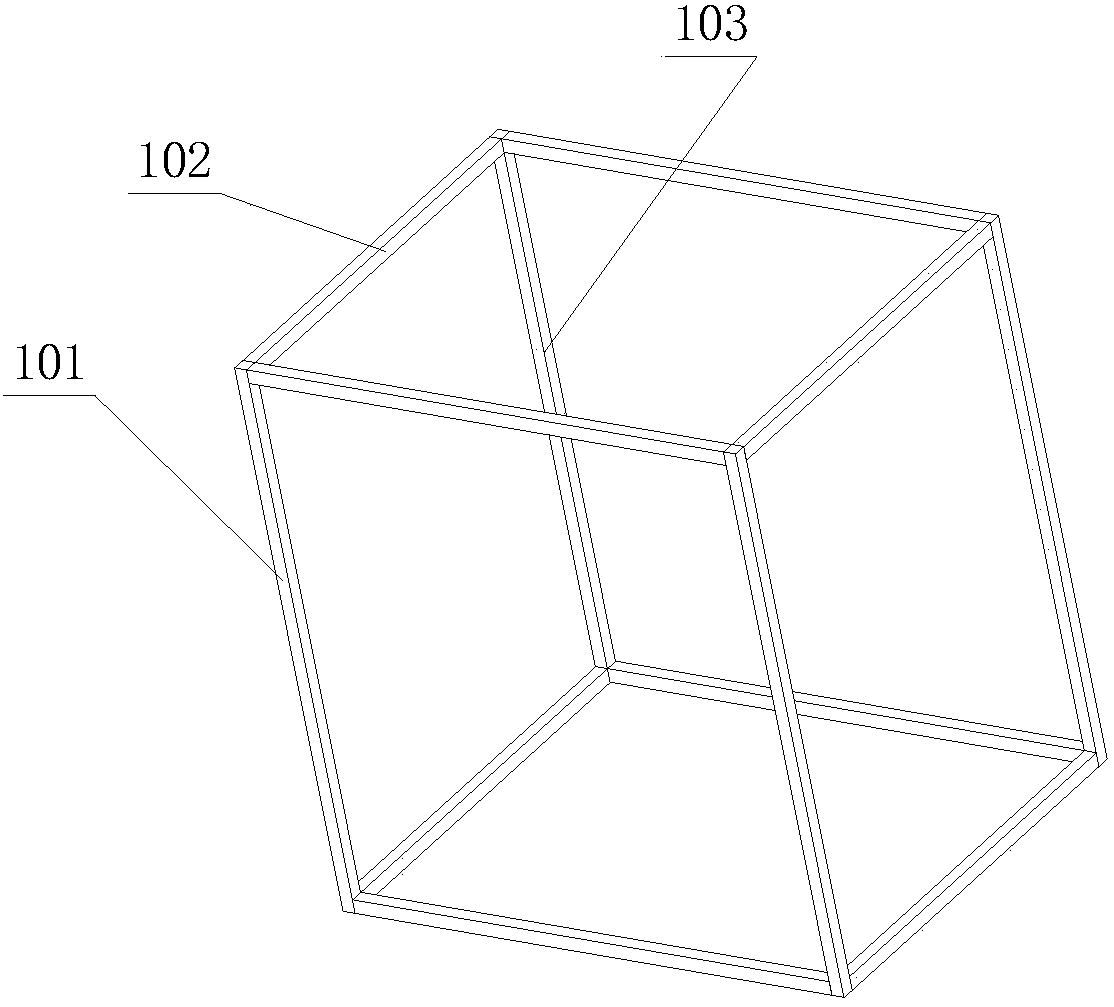
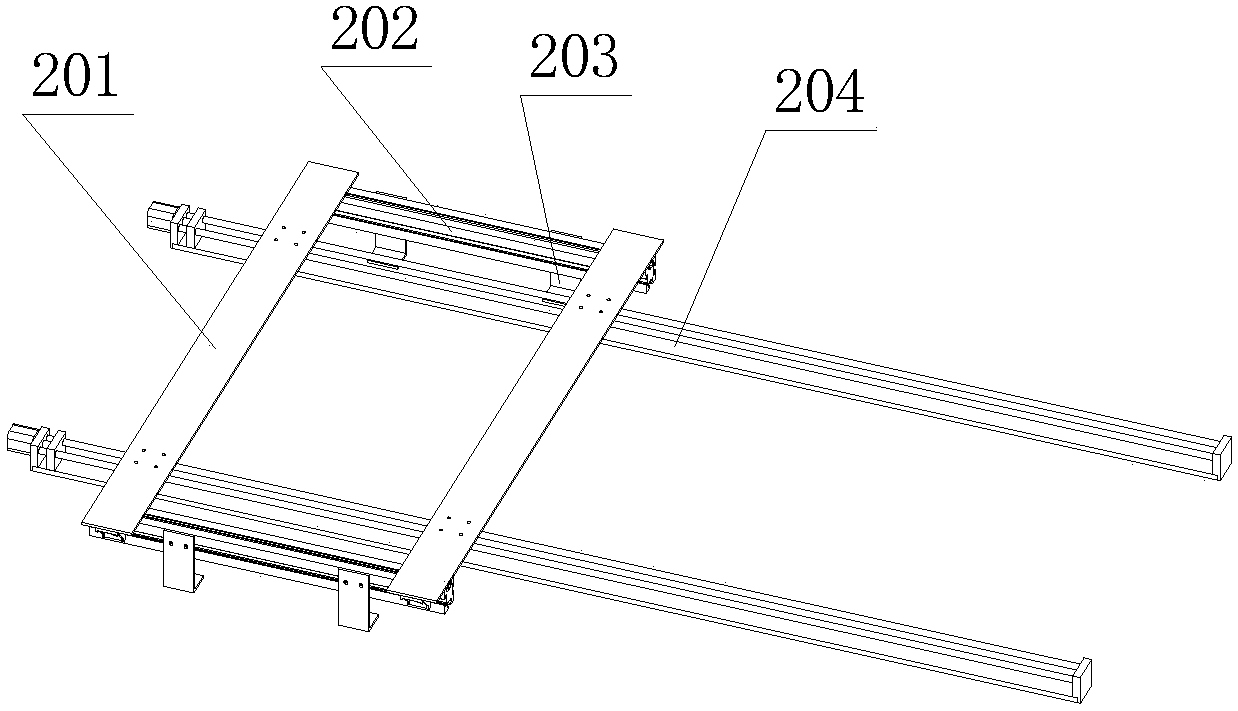
[0012] 1. See figure 1 , figure 2 , image 3 , Figure 4 , Figure 5 , Figure 6 , a three-degree-of-freedom grasping manipulator for a detection platform in this specific embodiment, which consists of: a bracket 1, a lateral movement mechanism 2, a longitudinal movement mechanism 3, a connecting frame 4 and a vertical movement mechanism 5, wherein the vertical movement mechanism in the support 1 The beam 101 is connected with the ball screw linear guide rail II 204 in the lateral motion mechanism 2 through bolts, the angle joint plate II 203 in the lateral motion mechanism 2 is connected with the ball screw linear guide rail III 301 in the longitudinal motion mechanism 3 through bolts, and the longitudinal motion mechanism 3 The angle joint plate III 304 in the frame is connected with the horizontal aluminum profile 401 in the connecting frame 4 by bolts, and the ball screw linear guide rail V501 in the vertical movement mechanism 5 is connected by bolts. During work, it...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More