

A minimally invasive surgery robot
A minimally invasive surgery and robot technology, applied in the field of medical devices, can solve the problems of increasing the labor intensity of doctors, reducing the accuracy of surgery, and threatening the lives of patients, and achieve the effects of reducing surgical injuries, increasing flexibility, and high load
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments, but the present invention is not limited to these embodiments.
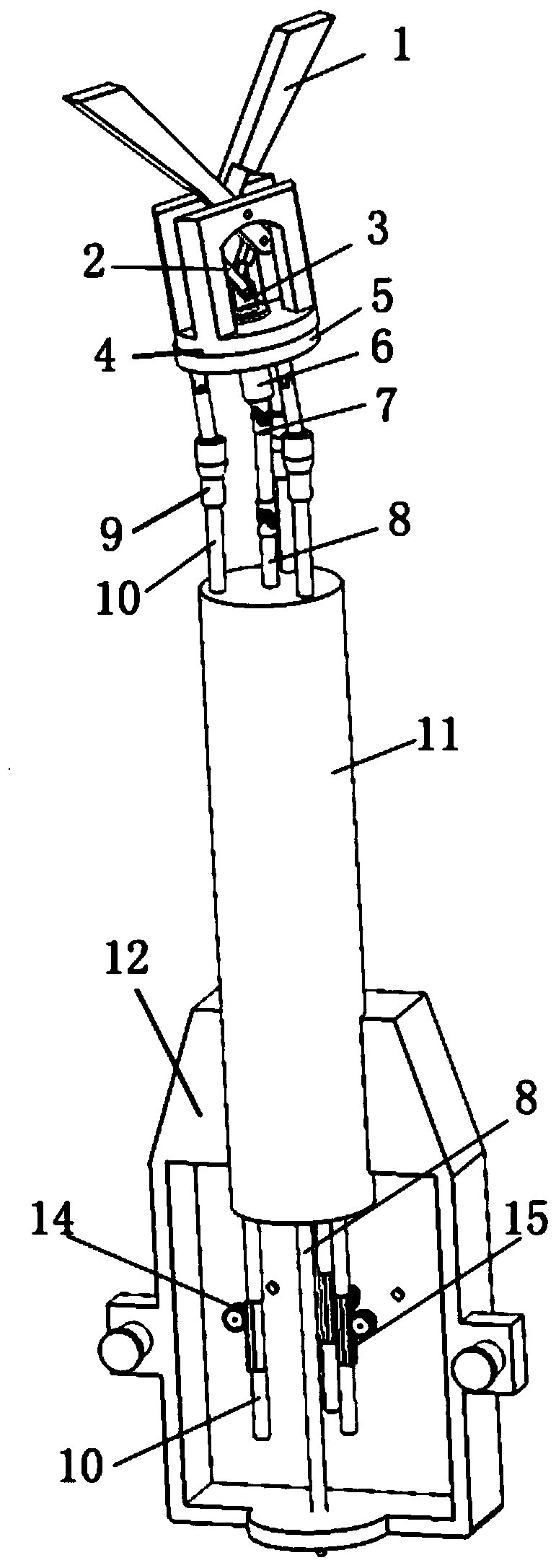
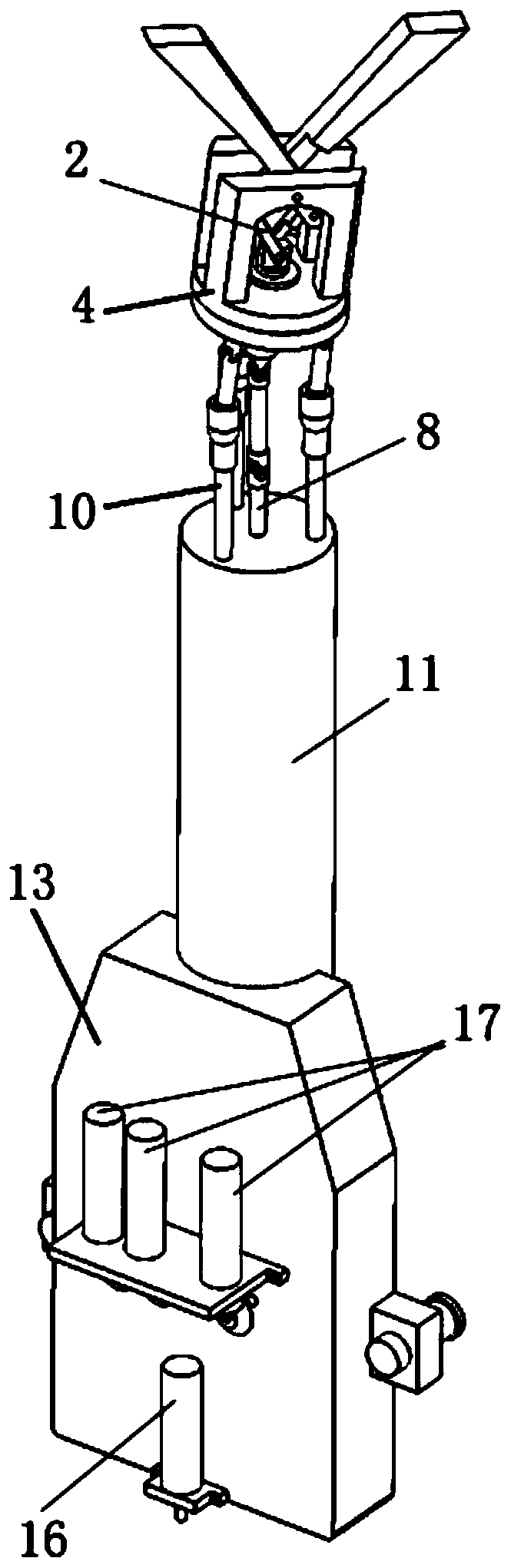
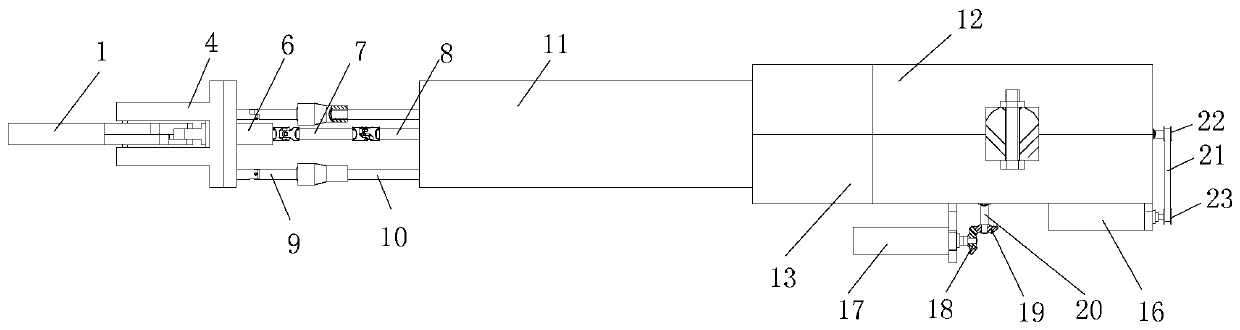
[0028] like Figure 1 to Figure 5 As shown, a minimally invasive surgery robot includes a box body, an end effector and a driving device.
[0029] The box is arranged in split form, including a left box 13 and a right box 12 . The two sides of the left and right boxes are respectively provided with opposite positioning blocks, and two adjacent positioning blocks are respectively connected by fasteners, bolts and nuts. One side of the box is also provided with a cylinder 11 connected thereto.
[0030] The end effector includes a connected upper platform 4 and a lower platform 5, and the upper platform 4 is provided with two cross-set clamps 1 for clamping medical instruments. Each clamp 1 is provided with clamping teeth on the clamping surface for clamping the medical ap...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More