A Cylinder-Based Humanoid Robot
A robot and cylinder technology, applied in the field of bionic robots, to achieve the effect of increasing degrees of freedom and working space
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
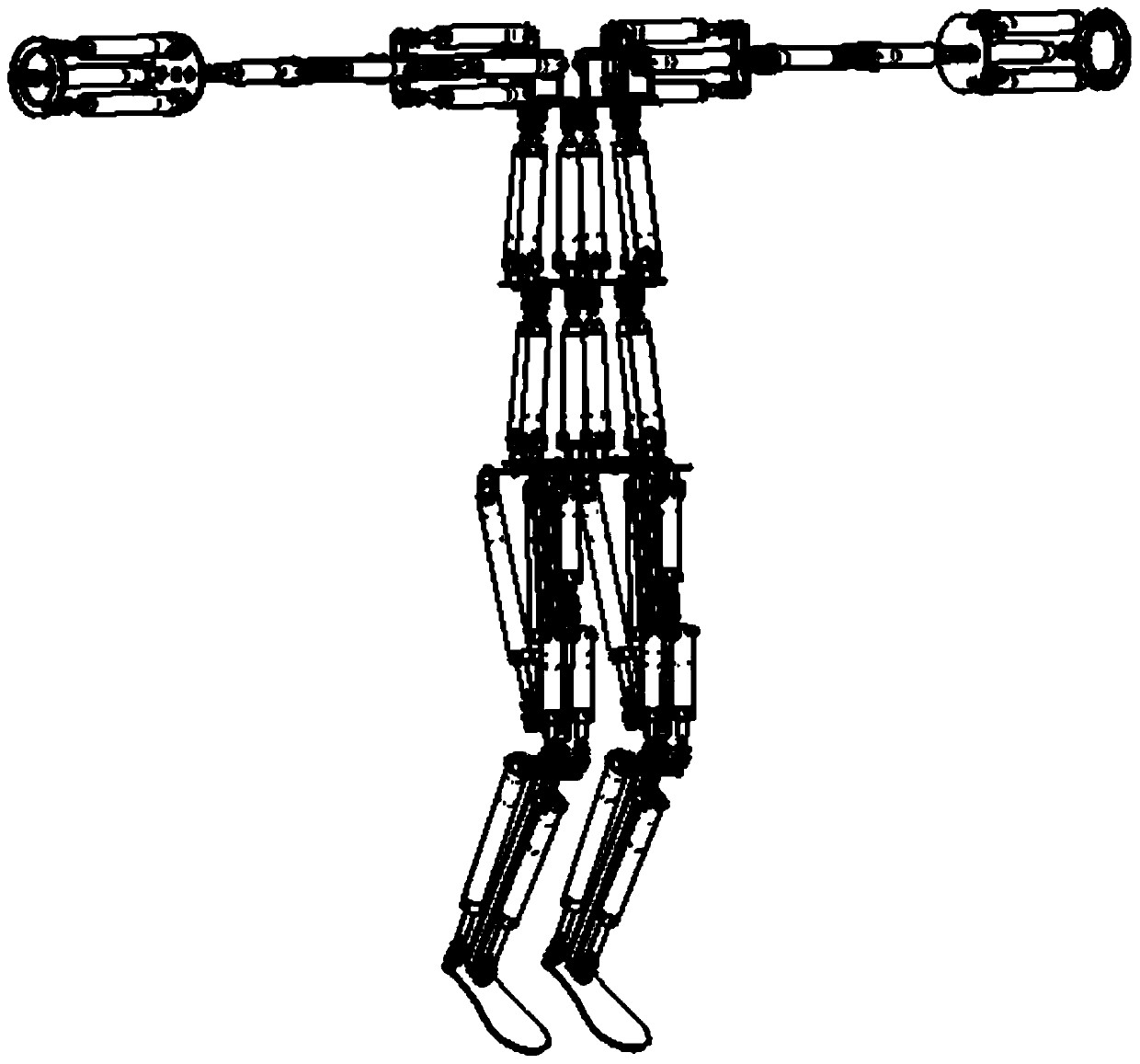
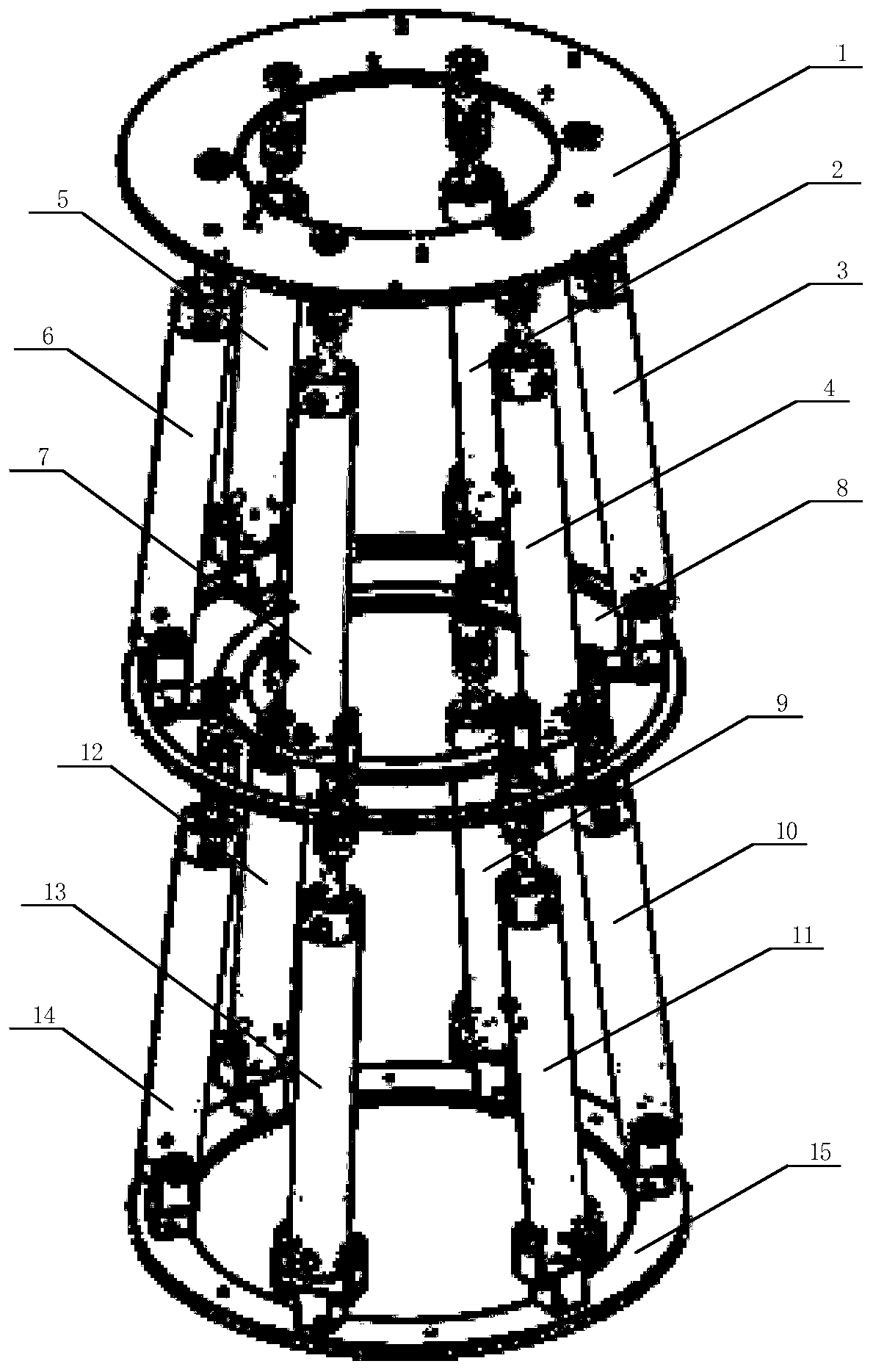
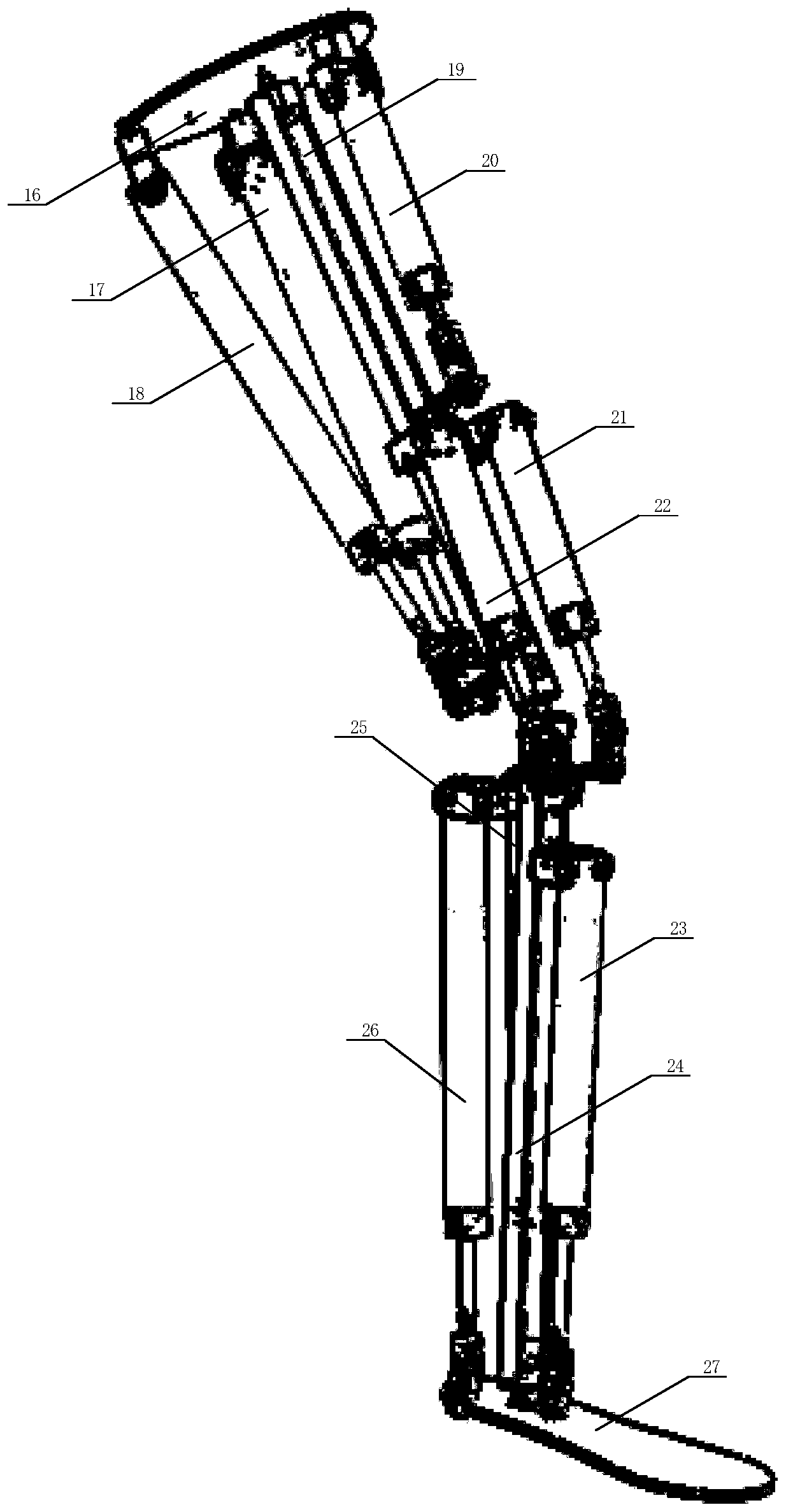
[0027] like figure 1 , 2 , 3, and 4, the cylinder-based humanoid robot of the present invention includes the first floor of the waist joint fixed plate 1, the first floor of the waist joint cylinder one 2, the first floor of the waist joint cylinder two 3, the first floor of the waist joint Cylinder three 4, cylinder four on the first layer of waist joint 5, cylinder five on the first layer of waist joint 6, cylinder six on the first layer of waist joint 7, fixing plate on the second layer of waist joint 8, cylinder one on the second layer of waist joint 9, waist Cylinder 2 on the second layer of the joint 10, cylinder 3 on the second layer of the lumbar joint 11, cylinder 4 on the second layer of the lumbar joint 12, cylinder 5 on the second layer of the lumbar joint 13, cylinder 6 on the second layer of the lumbar joint 14, and fixed on the third layer of the lumbar joint Plate 15, hip joint cylinder fixing plate 16, hip joint cylinder one 17, hip joint cylinder two 18, fem...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More