Gravity center Lagrange's interpolation method-based serial inertial navigation attitude calculation method
A technology of strapdown inertial navigation and interpolation method, applied in the field of attitude calculation of strapdown inertial navigation system
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
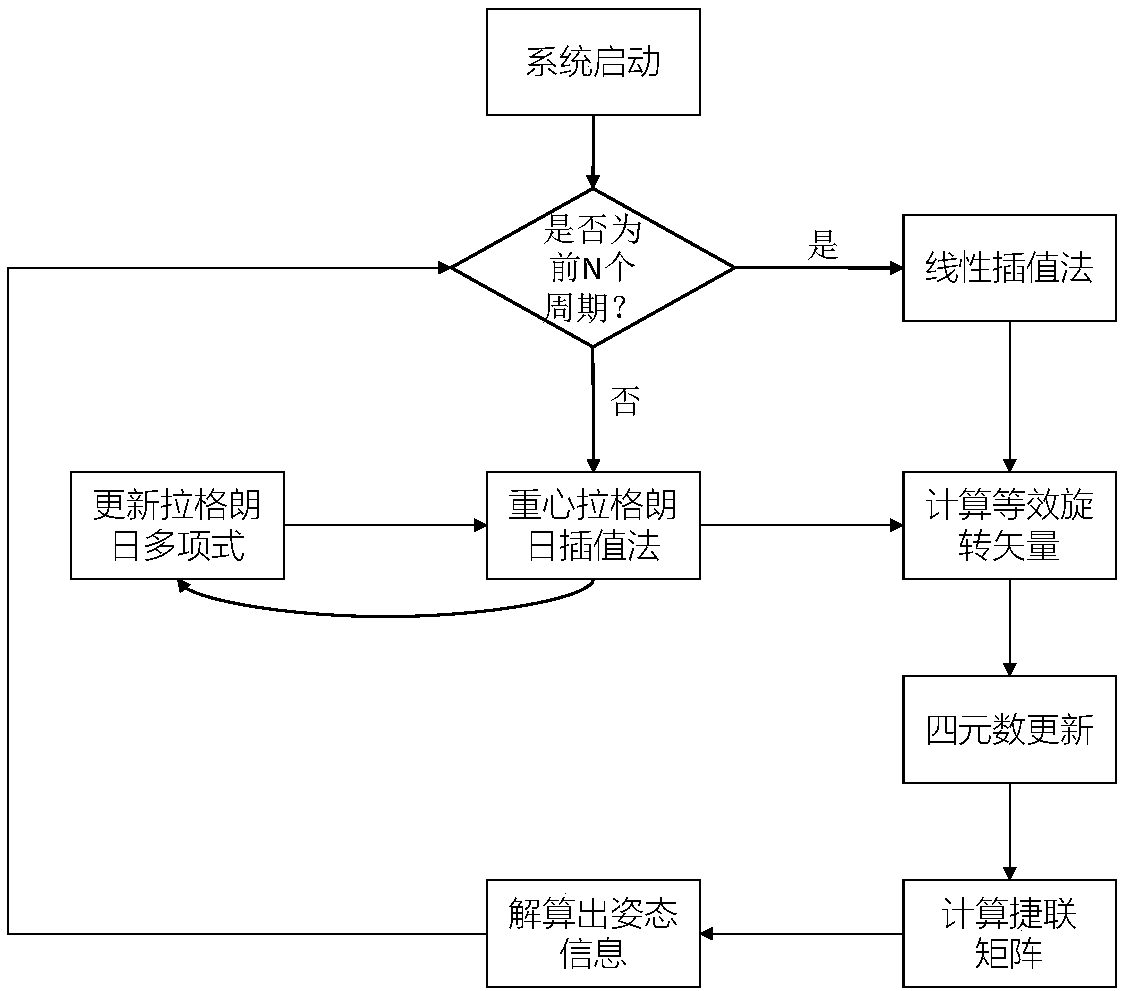
[0083] according to figure 1 As shown in the flow chart, the introduction is based on the attitude calculation method of the center of gravity Lagrangian interpolation method that the number of insertion points is 1, and the specific implementation of the present invention can be divided into the following steps to complete:
[0084] 1. System startup
[0085] This step includes the initial alignment process of the strapdown inertial navigation system, which provides initial values for the update iteration variables of the entire strapdown inertial navigation system (including: attitude, velocity, position, strapdown matrix, and quaternion, etc.).
[0086] 2. Linear interpolation method to insert angular rate information
[0087] In the first few cycles of the strapdown solution, since the available sampling angular rate information is relatively small, it is not enough to support the calculation of the Langrange interpolation method, so a simple linear interpolation metho...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More