

Full-coverage cleaning method of sweeping robot and sweeping robot
A sweeping robot, full coverage technology, applied in the field of robots, to achieve the effect of improving cleaning efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0101] It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
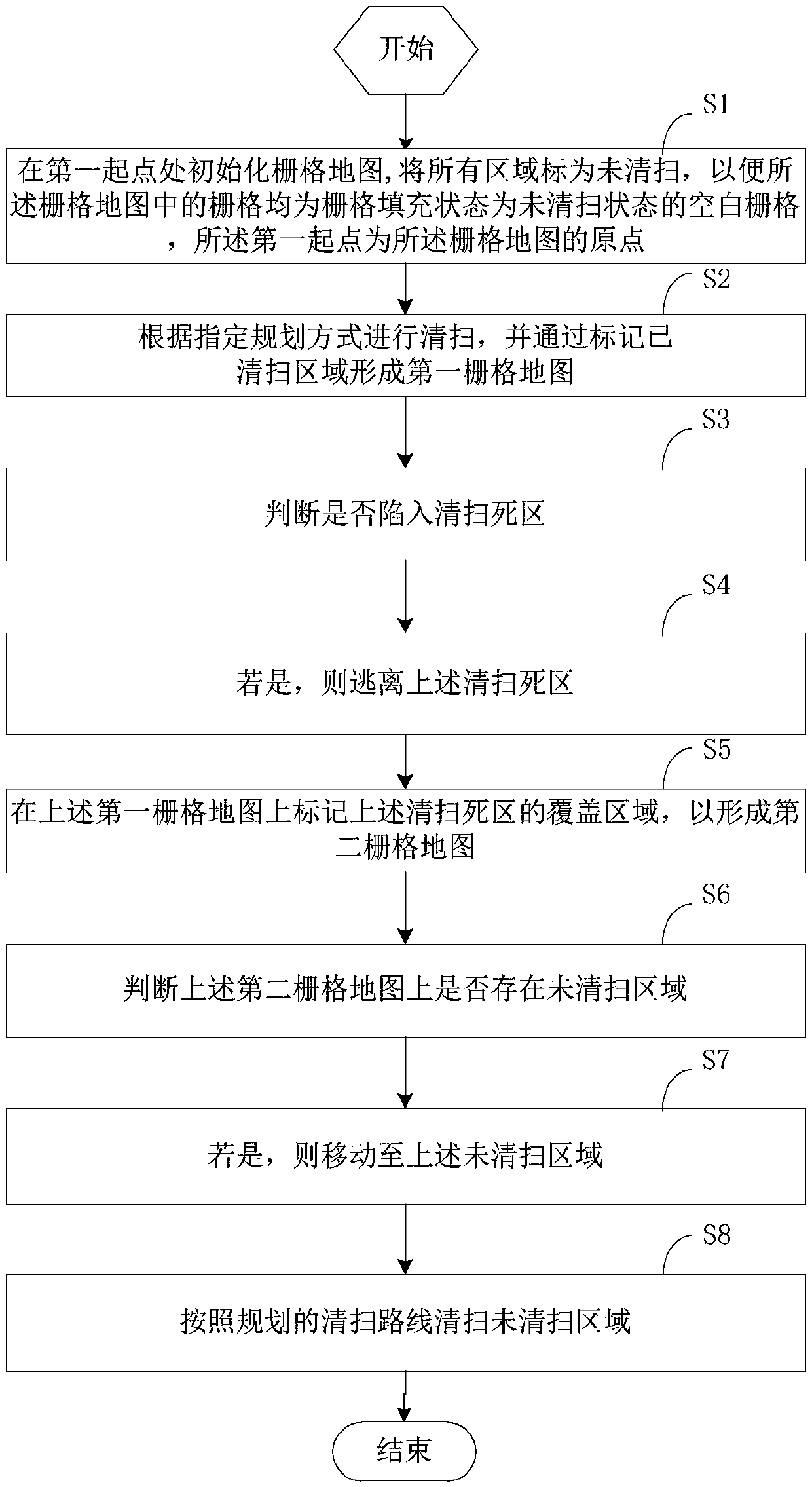
[0102] refer to figure 1 , a method for full-coverage cleaning by a sweeping robot according to an embodiment of the present invention, including:
[0103] S1: Initialize the grid map at the first starting point, so that the grids in the grid map are all blank grids whose grid filling status is not cleaned, and the first starting point is the origin of the grid map .
[0104] The first starting point in this step refers to the position of the sweeping robot when cleaning starts, and this is used as the coordinate origin of the grid map. In this embodiment, the sweeping robot forms a grid map by marking different grid filling states during the cleaning process, so as to gradually reduce the unknown area until all layout information of the original unknown area is recognized for full-coverage cleaning. For example, e...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More