

Position and posture optimization method and position and posture optimization system based on multi-map fusion
A technology of map fusion and optimization methods, which is used in image enhancement, image analysis, image data processing, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0083] Specific embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings. It should be understood that the specific embodiments described here are only used to illustrate and explain the present invention, and are not intended to limit the present invention.
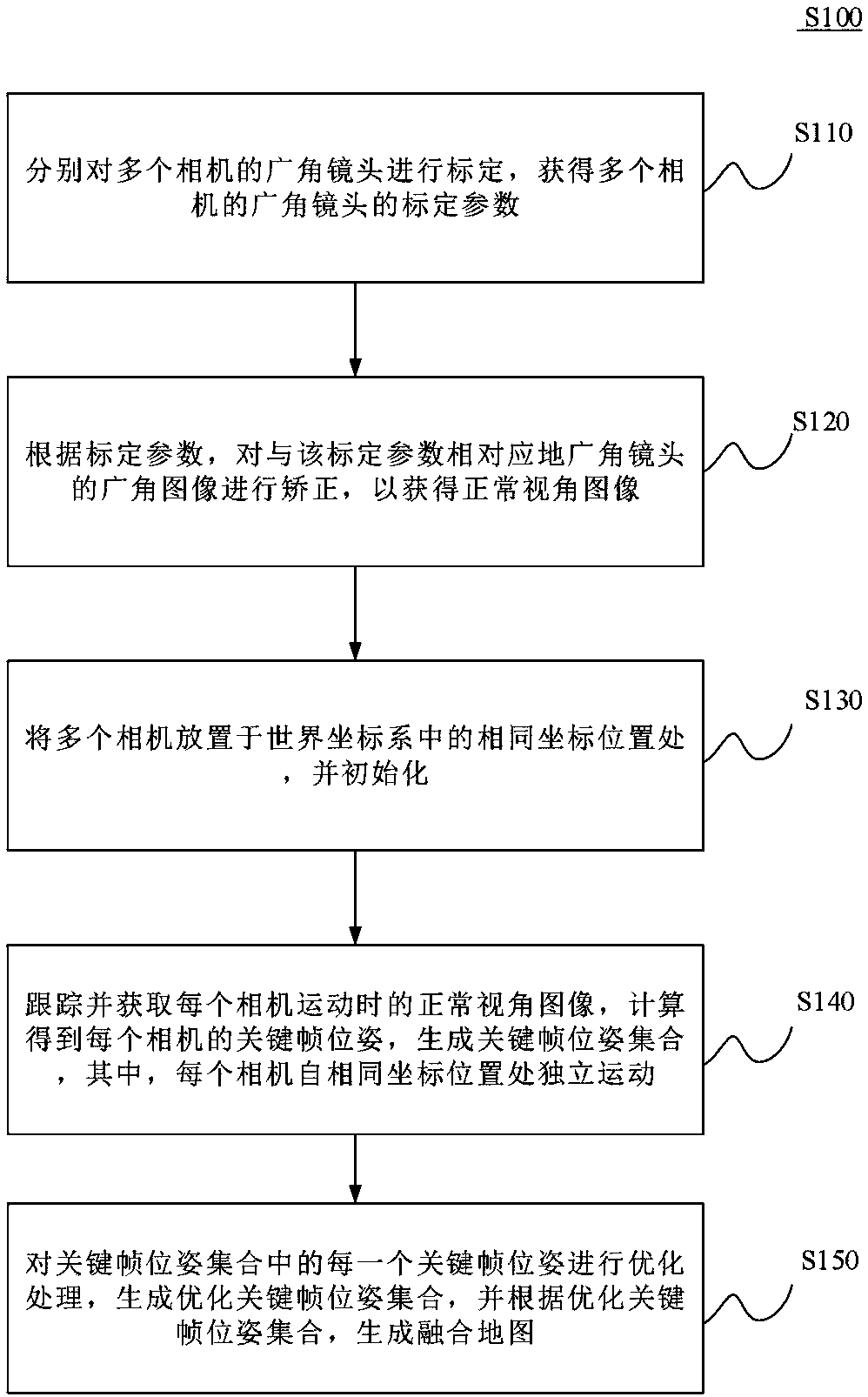
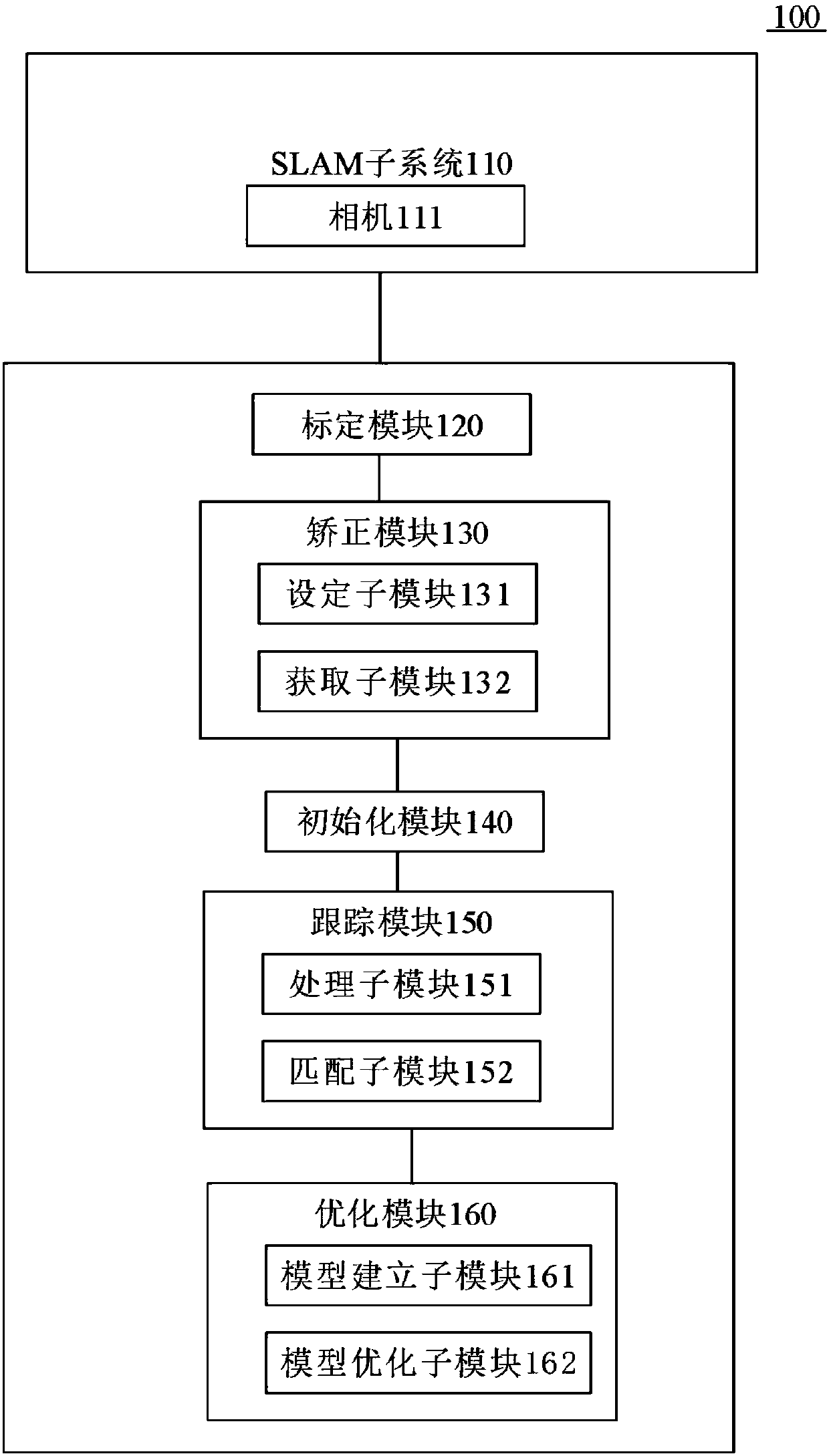
[0084] refer to figure 1 , the first aspect of the present invention relates to a pose optimization method S100 based on multi-map fusion. This optimization method is applicable to the pose optimization system 100 based on multi-map fusion of the present invention, such as figure 2 As shown, the system includes a plurality of SLAM subsystems 110 , and each SLAM subsystem 110 includes a plurality of cameras 111 . Method S100 includes:
[0085] S110. Calibrate the wide-angle lenses of the plurality of cameras respectively, and obtain calibration parameters of the wide-angle lenses of the plurality of cameras.
[0086] Specifically, in this step, for example, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More