

Unmanned vehicle control method based on over-the-horizon synergetic cognition and unmanned vehicle control system based on over-the-horizon synergetic cognition
A driverless car and cognitive system technology, applied in the field of driverless car control methods and systems, can solve the problem of not being able to perceive road traffic conditions, driverless cars not being able to perceive traffic conditions, aggravating traffic congestion and environmental pollution and other issues to achieve the effect of improving implementability and effectiveness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0065] The specific implementation method of the present invention will be described in detail below in conjunction with the accompanying drawings.
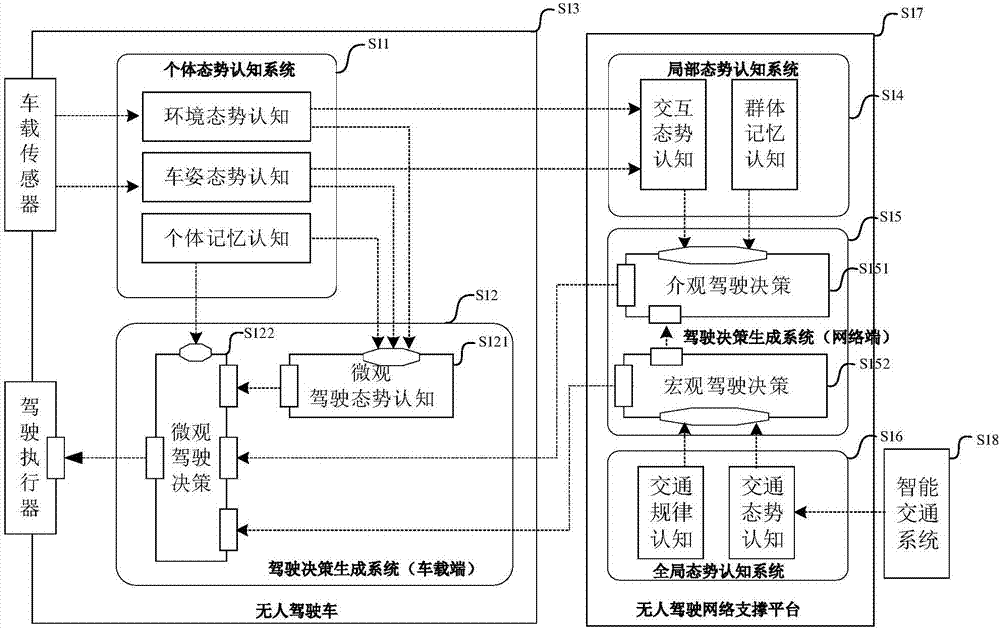
[0066] The present invention is an unmanned vehicle control system based on beyond-horizon cooperative cognition. The unmanned vehicle is mainly responsible for the cognition of the environmental conditions of the vehicle terminal and the execution of the final driving decision, mainly including the individual situational awareness system and the vehicle terminal. Driving Decision Generation System. Architecture as figure 1 As shown, including: unmanned vehicle S13 and unmanned network support platform S17.
[0067] The unmanned vehicle S13 includes an individual situational awareness system S11 and a driving decision generation system (vehicle terminal) S12.
[0068] The individual situation awareness system S11 collects the environmental data perceived by the vehicle, including the current position, through various sensors ca...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More