

Method for grabbing target object by mechanical arm with seven degrees of freedom
A target object and robotic arm technology, applied in the field of robotics, can solve problems such as narrow working environment space, unsuitable for humans or large equipment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
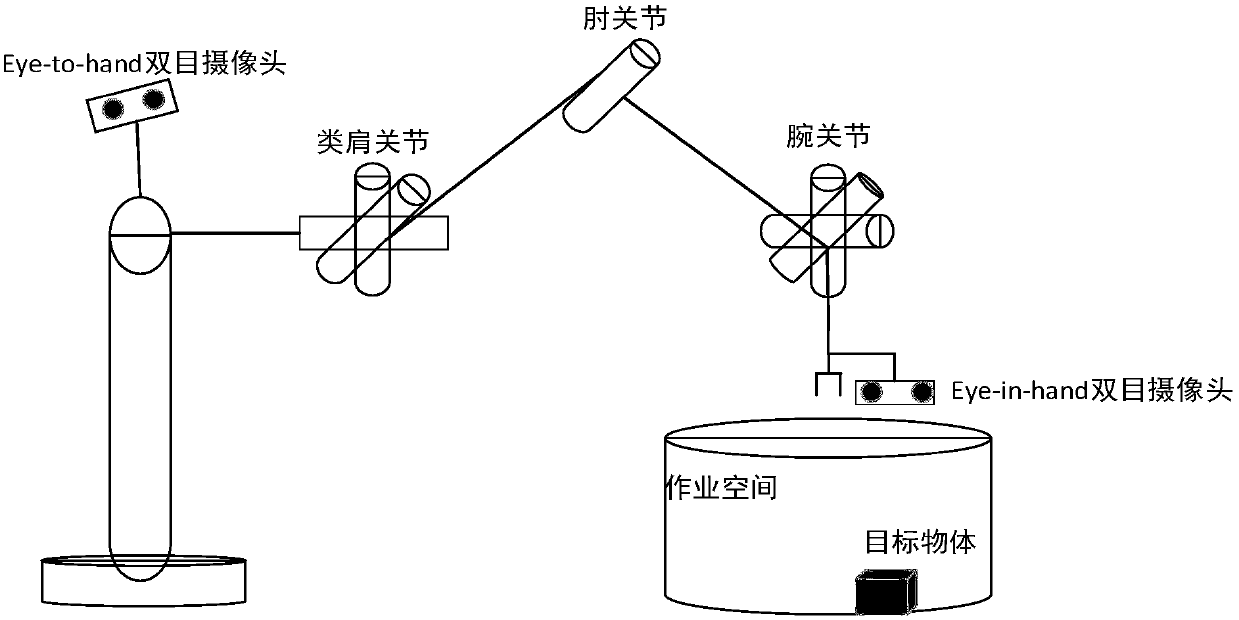
[0042] see figure 1 As shown, an embodiment of the present invention provides a method for grabbing a target object with a seven-degree-of-freedom manipulator assembly, the manipulator assembly including a first camera and a second camera; wherein the first camera is installed on the machine On the robot body of the arm assembly, the second camera is installed at the end of the robot arm.
[0043] The characteristics of the seven-degree-of-freedom robotic arm include: the first joint of seven degrees of freedom is a moving joint, and the other six are rotating joints, which are divided into a shoulder-like joint (3 degrees of freedom), including one moving joint and two rotating joints , whose central axes intersect at one point, an elbow joint (1 degree of freedom) and a wrist joint (3 degrees of freedom), including 3 mutually perpendicular rotation joints, whose central axes intersect at one point, similar to a human arm, and each The joint axes of the degrees of freedom ar...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More