Environment map construction method and device
A technology of environment map and construction method, which is applied in the field of mobile robots and can solve problems such as poor precision and poor accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
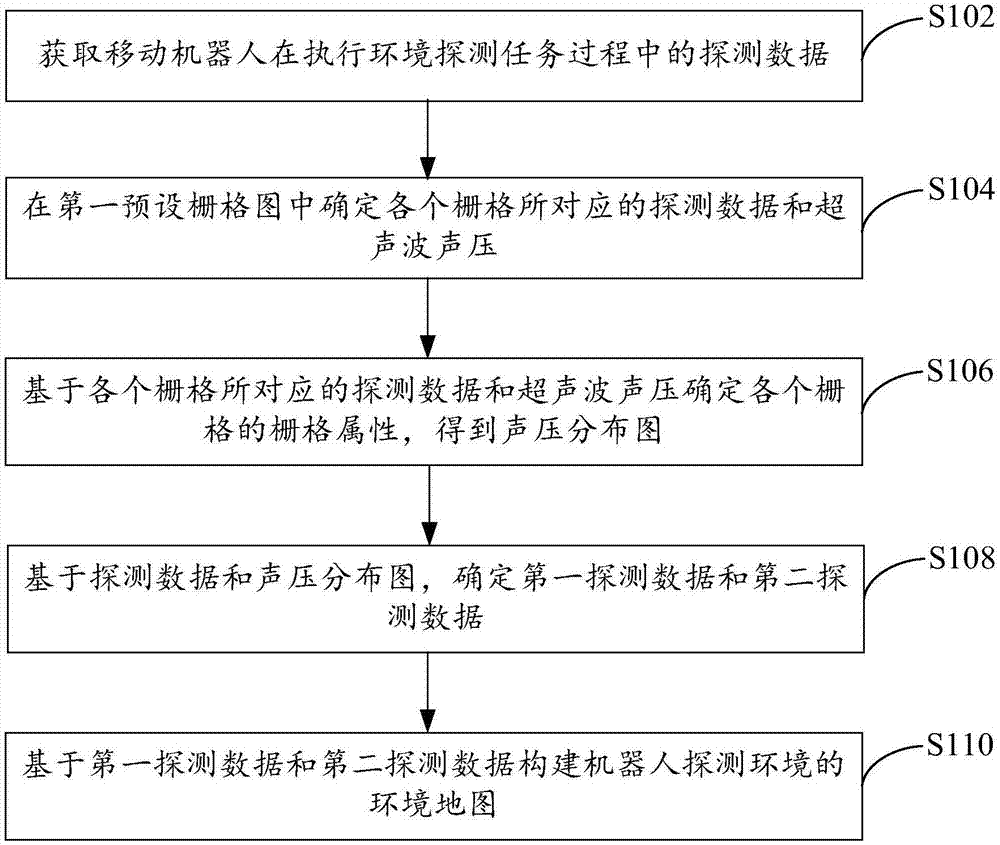
[0076] A method for constructing an environment map, refer to figure 1 , the method includes:
[0077] S102. Obtain detection data of the mobile robot during the execution of the environment detection task, wherein the detection data includes: pose data of the mobile robot and ultrasonic data corresponding to the pose data;
[0078] In the embodiment of the present invention, the construction method of the environment map is an offline map construction method, which needs to be carried out after the mobile robot completes the detection task. When a mobile robot performs an environmental detection task, it will collect detection data. The so-called detection data is the pose data of the mobile robot and the ultrasonic data corresponding to the pose data.
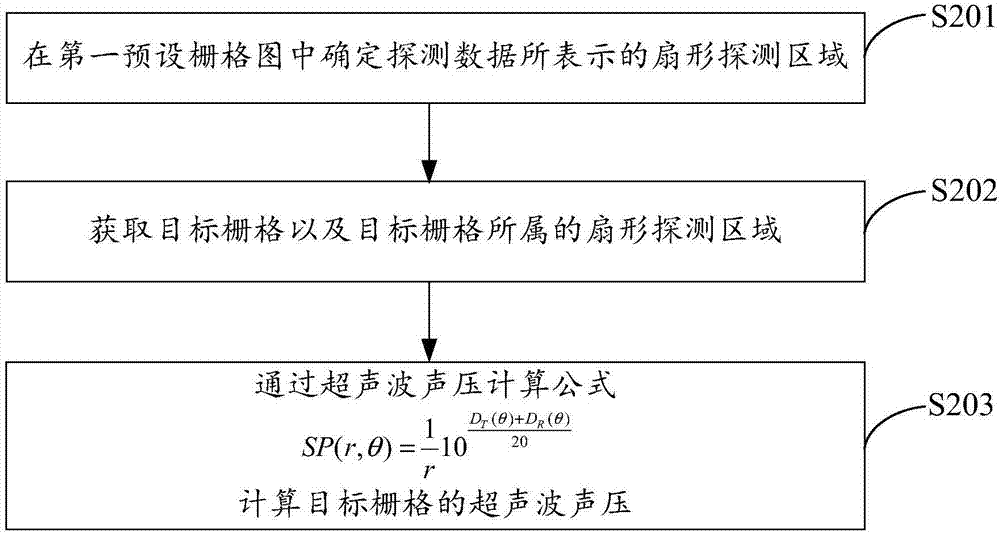
[0079] S104. Determine the detection data and ultrasonic sound pressure corresponding to each grid in the first preset grid map;
[0080] After the detection data is obtained, the detection data and ultrasonic sound pressur...
Embodiment 2
[0162] An environment map construction device, refer to Figure 9 , the device consists of:
[0163] The acquisition module 11 is configured to acquire detection data of the mobile robot during the execution of the environment detection task, wherein the detection data includes: pose data of the mobile robot and ultrasonic data corresponding to the pose data;
[0164] The first determination module 12 is used to determine the detection data and ultrasonic sound pressure corresponding to each grid in the first preset grid map;
[0165] The second determination module 13 is configured to determine the grid attributes of each grid based on the detection data corresponding to each grid and the ultrasonic sound pressure, and obtain a sound pressure distribution map;
[0166] The third determination module 14 is used to determine the first detection data and the second detection data based on the detection data and the sound pressure distribution map, wherein the first detection da...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap