

Full-active seven-freedom-degree posture redundancy type main manipulator
A master operator and degree of freedom technology, applied in the field of robotics, can solve problems such as difficulty in achieving high precision, inability to achieve new positions and postures, and achieve the effect of precise movement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
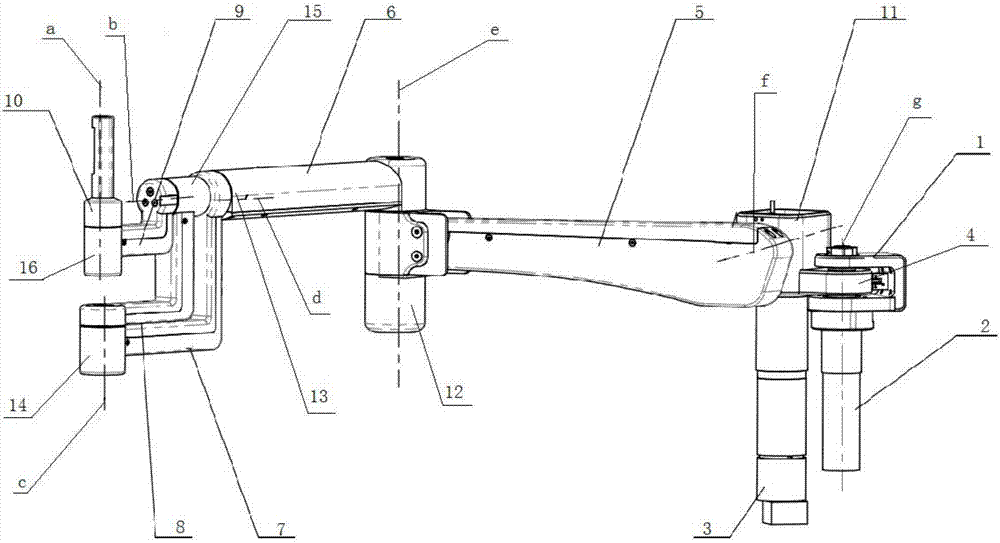
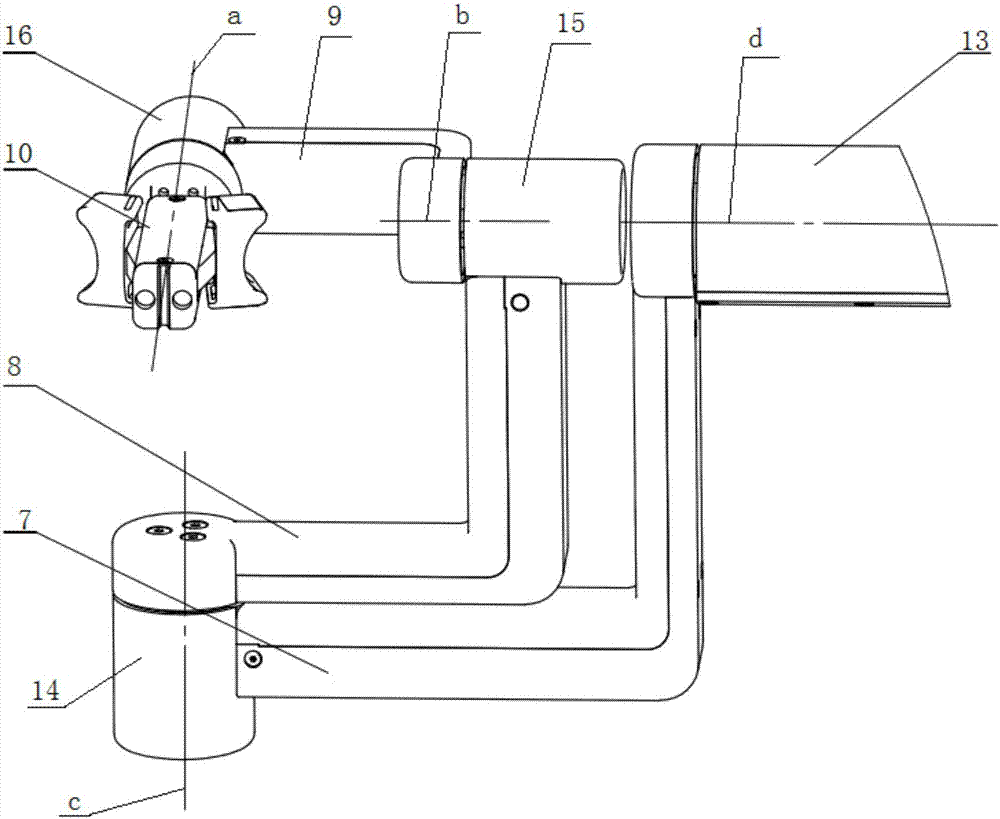
[0018] Specific implementation mode one: combine Figure 1 to Figure 3 Describe this embodiment. The fully active seven-degree-of-freedom posture redundant main operator described in this embodiment includes a fixed seat 1, a shoulder pan motor 2, a shoulder pitch motor 3, a shoulder joint 4, and a boom mechanism. 5. Horizontal link 6, attitude redundant link 7, attitude yaw link 8, attitude pitch link 9, rotary handle 10, shoulder gear box 11, horizontal motor 12, redundant motor 13, yaw motor 14 , the pitch motor 15 and the rotary motor 16, the outer casing of the shoulder swing motor 2 is fixedly connected with the holder 1, the output shaft of the shoulder swing motor 2 is fixedly connected with the rear end of the shoulder joint 4, and the shoulder joint 4 The front end is affixed to the outer casing of the shoulder gear box 11, the input shaft of the shoulder gear box 11 is affixed to the output shaft of the shoulder pitch motor 3, and the output shaft of the shoulder ge...
specific Embodiment approach 2
[0032] Specific implementation mode two: combination figure 1 Describe this embodiment, the output shaft of the shoulder swing motor 2 described in this embodiment is vertically arranged, the output shaft of the shoulder gearbox 11 is horizontally arranged, the output shaft of the horizontal motor 12 is vertically arranged, and the output of the redundant motor 13 Shafts are set horizontally, the output shaft of the yaw motor 14 is set vertically, the output shaft of the pitch motor 15 is set horizontally, and the output shaft of the rotary motor 16 is set vertically. Other compositions and connection methods are the same as those in Embodiment 1.
[0033] So designed to determine the direction of motion in seven degrees of freedom.
specific Embodiment approach 3
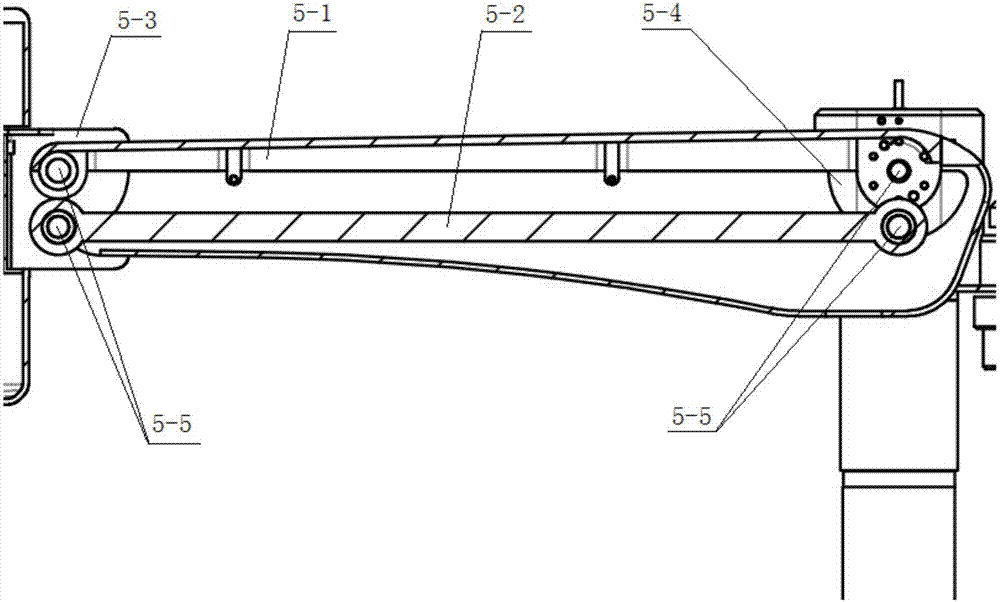
[0034] Specific implementation mode three: combination figure 1 and figure 2 Describe this embodiment, the boom mechanism 5 described in this embodiment includes a main arm 5-1, an auxiliary arm 5-2, a front connecting ear 5-3, a rear connecting ear 5-4 and four rotating shafts 5-5, the main arm 5-1 and the auxiliary arm 5-2 are arranged in parallel and the length of the main arm 5-1 is the same as that of the auxiliary arm 5-2. One end of the main arm 5-1 is hinged with the front connecting ear 5-3 through the rotating shaft 5-5, and the main arm The other end of 5-1 is hinged with rear connecting ear 5-4 through rotating shaft 5-5, one end of auxiliary arm 5-2 is hinged with front connecting ear 5-3 through rotating shaft 5-5, and the other end of auxiliary arm 5-2 is through The rotating shaft 5-5 is hinged with the rear connecting ear 5-4, the front connecting ear 5-3 is affixed to the outer casing of the horizontal motor 12, and the rear connecting ear 5-4 is affixed to...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More