

A high-stiffness hybrid robot capable of gravity self-balancing
A self-balancing, high-stiffness technology, applied in the field of high-stiffness hybrid robots, can solve problems such as low overall stiffness and poor load capacity, and achieve the effects of good manufacturing process performance, excellent stiffness, and guaranteed assembly manufacturability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] A high-stiffness hybrid robot that can realize gravity self-balancing according to the present invention will be described in detail below with reference to the embodiments and the accompanying drawings.
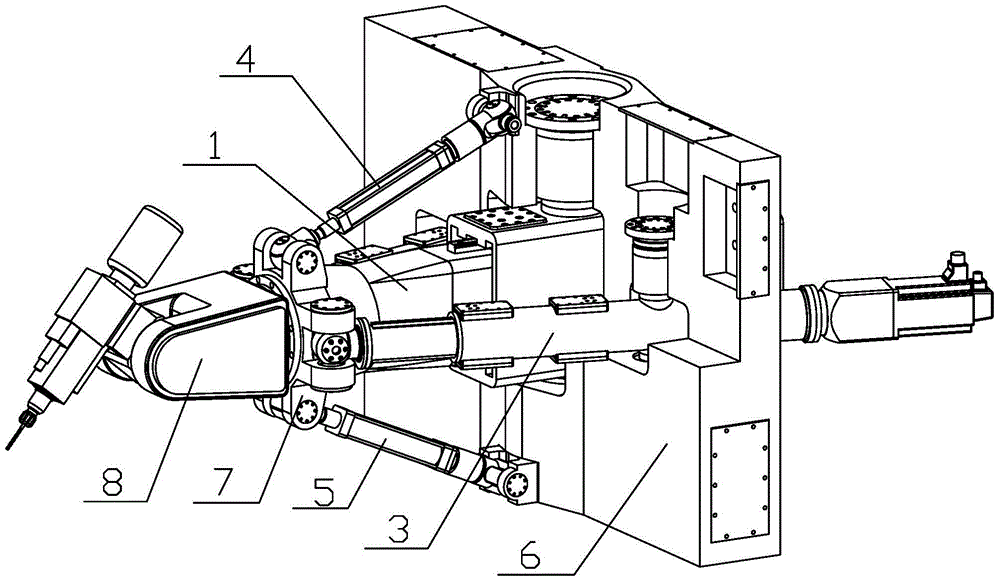
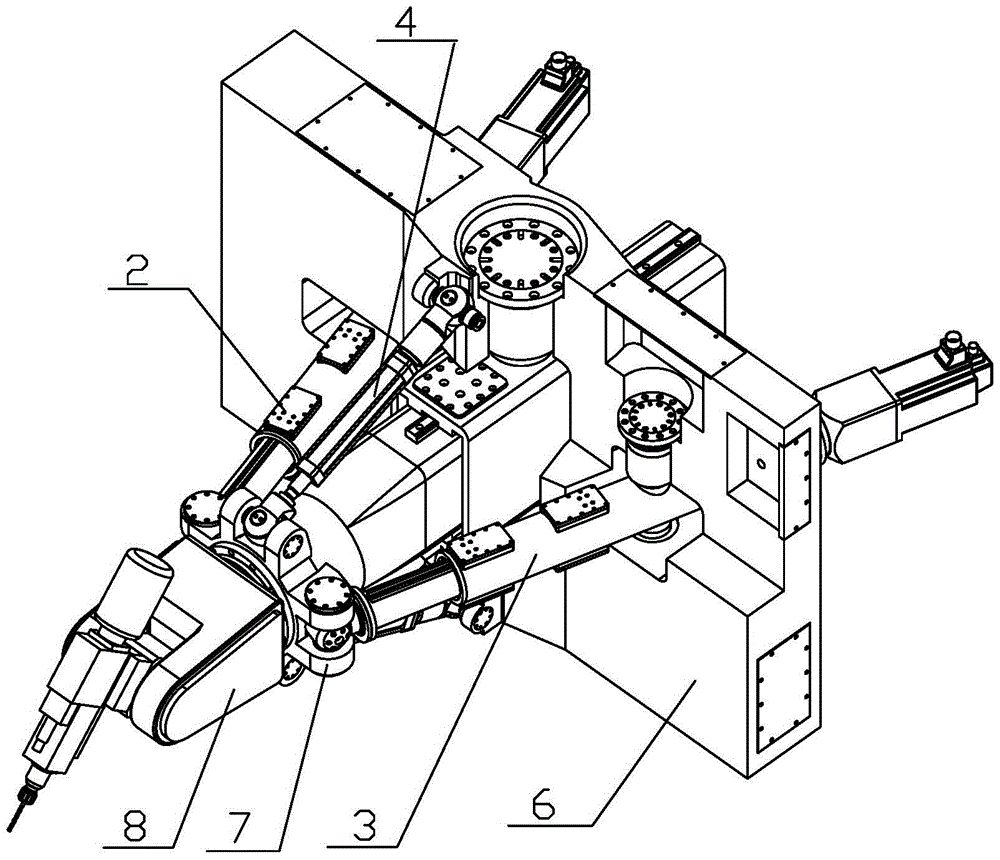
[0039] Such as figure 1 , figure 2 As shown, a high-rigidity hybrid robot capable of gravity self-balancing of the present invention includes a moving platform 7, a positioning head 8 that is rotatably connected to one side of the moving platform 7, and a fixing head 8 positioned at the other side of the moving platform 7. The frame 6 is also provided with the first branch chain 1, the second branch chain 2, the third branch chain 3, the fourth branch chain 4 and the fifth branch chain 5, wherein the first branch chain 1 can rotate horizontally through the The through hole in the middle of the fixed frame 6, the end of the first branch chain 1 is fixedly connected to the moving platform 7 on one side of the fixed frame 6, and the top end of the first branch chain 1 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More