

Unmanned aerial vehicle cluster homeward voyage control method
A control method and unmanned aerial vehicle technology, applied in three-dimensional position/channel control, non-electric variable control, control/adjustment system, etc., can solve the problems of manpower consumption, preparation time, high cost, large occupied area, etc., and achieve saving Effects of labor cost, reduction of restrictions, and cost reduction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
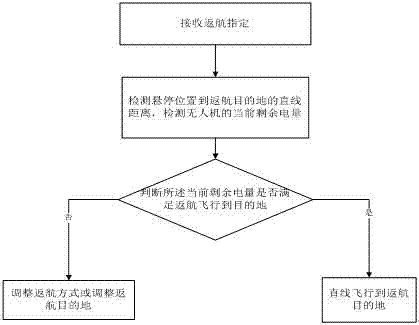
[0025] Such as figure 1 As shown, this application proposes a UAV cluster return control method, the UAV cluster includes N UAVs, and the N UAVs are in the hovering flight space;
[0026] Receive return designation;
[0027] Detect the straight-line distance from the hovering position to the return destination, and detect the current remaining power of the drone;
[0028] Judging whether the current remaining power is sufficient for the return flight to the destination;
[0029] If yes, fly straight to the return destination, if not, adjust the return method or adjust the return destination.
[0030] In the above-mentioned method for controlling the return flight of a UAV cluster, the return instruction includes: checking the numbering sequence of the N UAVs, and sending the return order to the UAVs in a delayed manner according to the sequence, until all the UAVs Both the man and the machine have received the return order. After the return order is sent, check whether the ...
Embodiment 2
[0036] Such as figure 1 As shown, this application proposes a UAV cluster return control method, the UAV cluster includes N UAVs, and the N UAVs are in the hovering flight space;
[0037] Receive return designation;
[0038] Detect the straight-line distance from the hovering position to the return destination, and detect the current remaining power of the drone;
[0039] Judging whether the current remaining power is sufficient for the return flight to the destination;
[0040] If yes, fly straight to the return destination, if not, adjust the return method or adjust the return destination.
[0041] In the method for controlling the return of a UAV cluster, the return instruction includes: selecting any UAV at the center position as a base point, defined as the first UAV, and taking the first UAV as a base point, hovering towards The identification information is transmitted in at least two directions in the space, and the 2-N UAVs are distributed in proportion to identify t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More