

Robot thought attribute construction method and device and interaction method and device
A technology of construction method and interaction method, which is applied in the fields of interaction method and device, and construction method of robot ideological attributes, which can solve problems such as no thinking process, no anthropomorphic characteristics, and immovable limbs.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
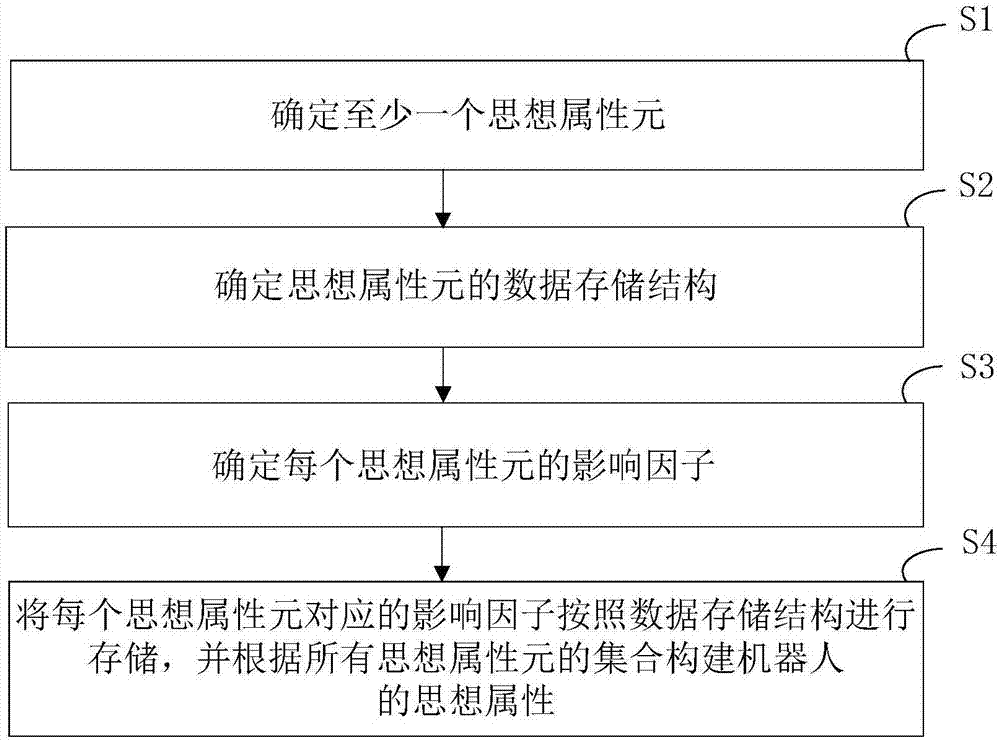
[0045] combine figure 1 , the method for constructing robot thought attributes provided by this embodiment includes,
[0046] Step S1, determining at least one thought attribute element;
[0047] Step S2, determining the data storage structure of the thought attribute element;
[0048] Step S3, determining the impact factor of each ideological attribute element;
[0049] Step S4, storing the impact factor corresponding to each thought attribute element according to the data storage structure, and constructing the thought attribute of the robot according to the set of all thought attribute elements.
[0050] The robot thought attribute construction method provided by the embodiment of the present invention establishes the robot thought attribute, and based on the thought attribute, the robot can have a thinking process similar to a human being, and can have the ability of autonomous cognition and decision-making similar to a human being.
[0051] It should be noted that, in ...
Embodiment 2
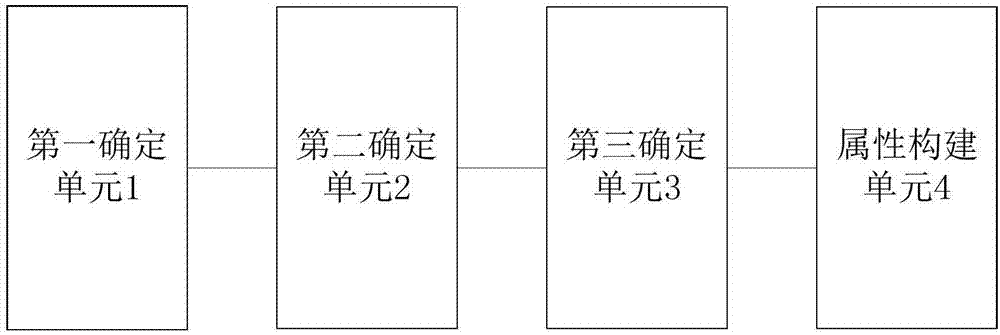
[0062] combine figure 2 , the device for constructing robot thought attributes provided by this embodiment includes,
[0063] The first determining unit 1 is configured to determine at least one ideological attribute element;
[0064] The second determination unit 2 is used to determine the data storage structure of the thought attribute element;
[0065] The third determination unit 3 is used to determine the impact factor of each ideological attribute element;
[0066] The attribute construction unit 4 is used to store the impact factor corresponding to each thought attribute element according to the data storage structure, and construct the thought attribute of the robot according to the set of all thought attribute elements.
[0067] The robot thought attribute construction device provided by the embodiment of the present invention establishes the robot thought attribute, and based on the thought attribute, the robot can have a thinking process similar to that of a huma...
Embodiment 3
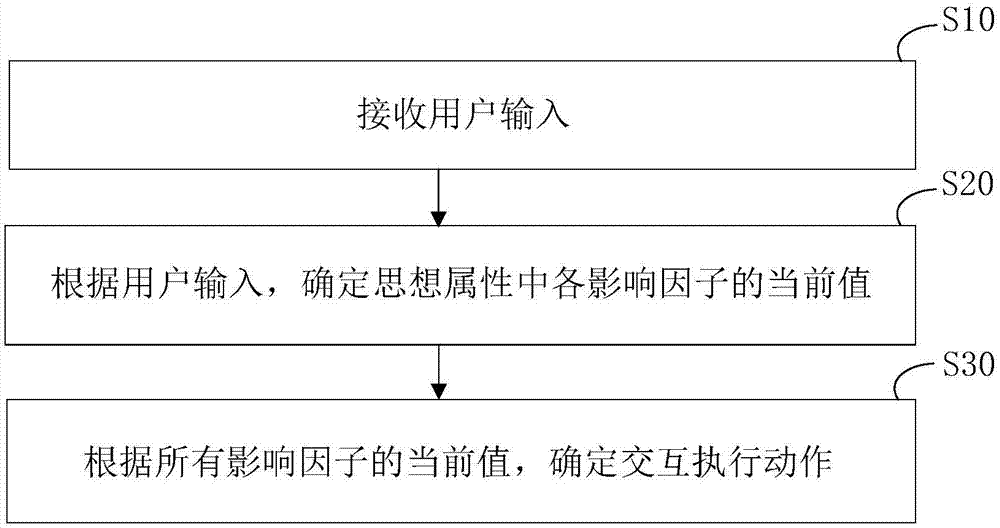
[0079] combine image 3 , the interaction method of the robot based on the thought attribute provided by this embodiment includes,
[0080] Step S10, receiving user input;
[0081] Step S20, according to user input, determine the current value of each influencing factor in the thought attribute;
[0082] Step S30, determine the interactive execution action according to the current values of all influencing factors.
[0083] In this embodiment, for any input from any user, the robot will determine the next action to be performed according to its own current thinking attributes. Specifically, the interaction execution action includes controlling the action of the self body and controlling the action of a third-party object. And more specifically, controlling self-actions includes but not limited to overall movement, body movements, and facial expressions; controlling actions of third-party objects includes but not limited to controlling the state of third-party objects and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More