

A small soccer robot recognition and tracking method based on rgbd information
A football robot and robot technology, which is applied in the field of visual perception servo movement, can solve the problems of complex goals and high dynamics of football games, and achieve the effect of high adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
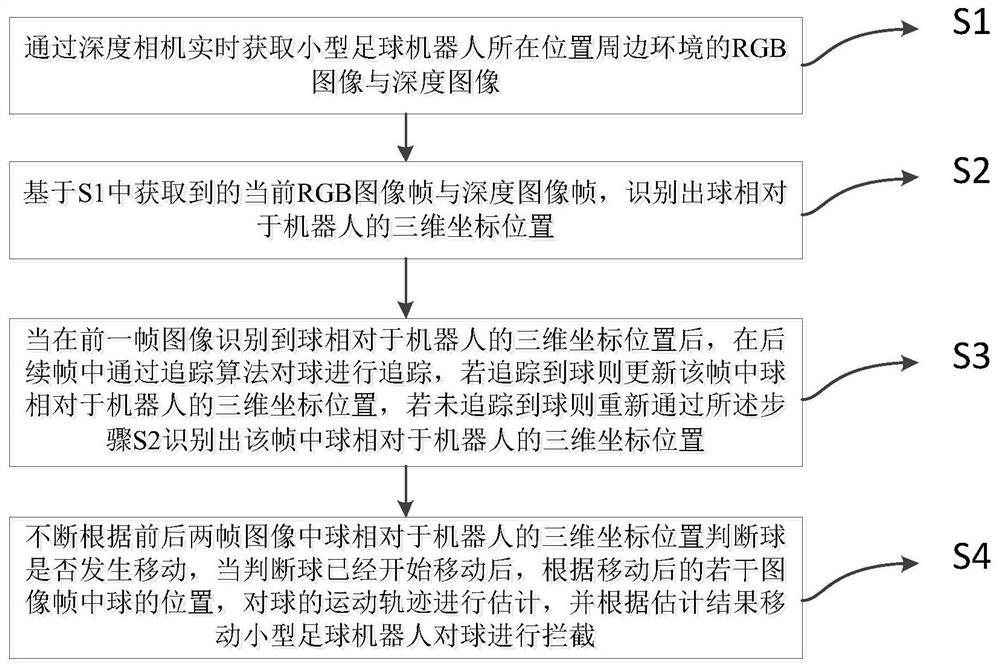
[0050] In this embodiment, it is necessary to equip a small football robot with a visual unit and a computing chip that does not originally have an independent vision and an independent computing processing system. Due to the need to obtain a separate vision, this embodiment installs an IntelRealSense D435 depth camera on the robot, so that the robot can obtain the visual image ahead.
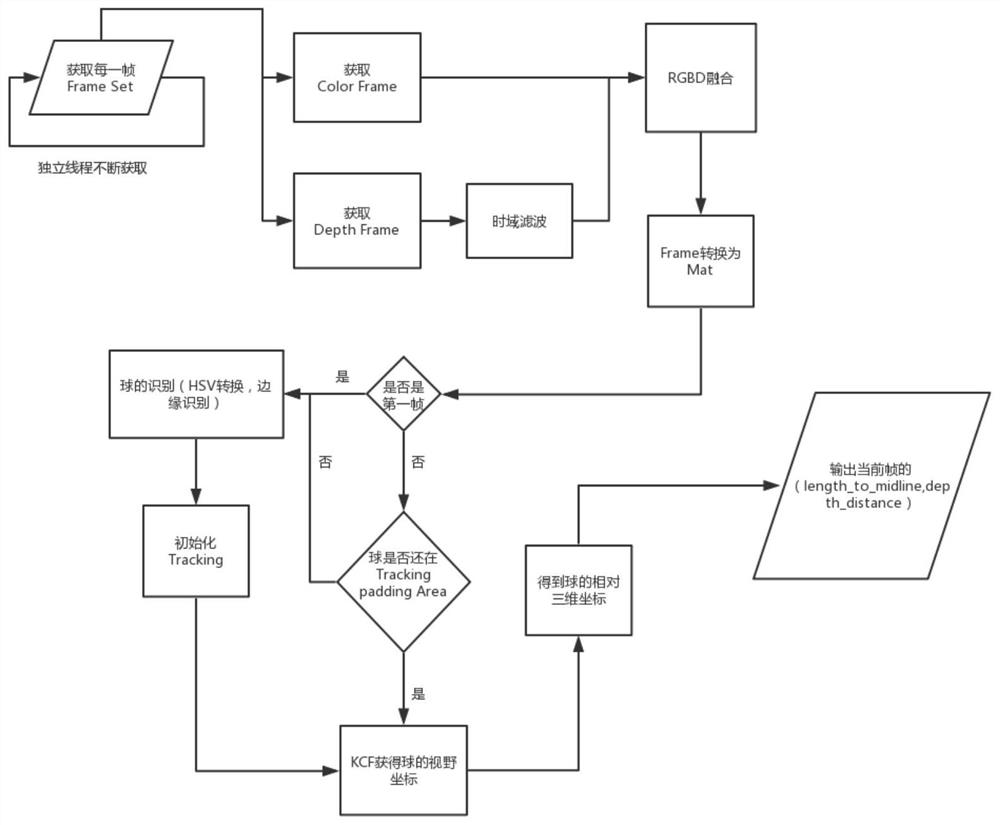
[0051] The first step to realize the recognition and tracking of the ball is to recognize the position of the ball from the visual image. The schematic diagram of the process is as follows: figure 2 As shown, it will be described in detail below.
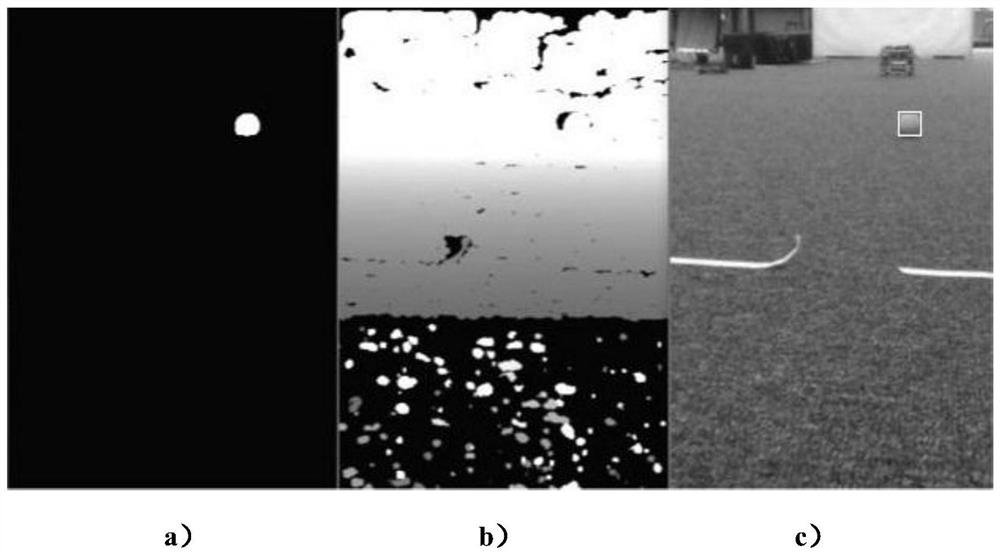
[0052] 1. Visual identity
[0053] 1.1 Acquisition of visual information: Since the hardware uses the Intel RealSense D435 depth camera as the sensing element, the RGB image information, depth information, and point cloud information can be obtained through the official Intel RealSense SDK (Software Development Kit): librealsense. The specific API...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More