

A coal mine search and rescue robot and its cognitive behavior search and rescue method
A robot and behavior technology, applied in manipulators, motor vehicles, program-controlled manipulators, etc., can solve problems such as inability to achieve generalized knowledge incremental learning, casualties and property losses, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
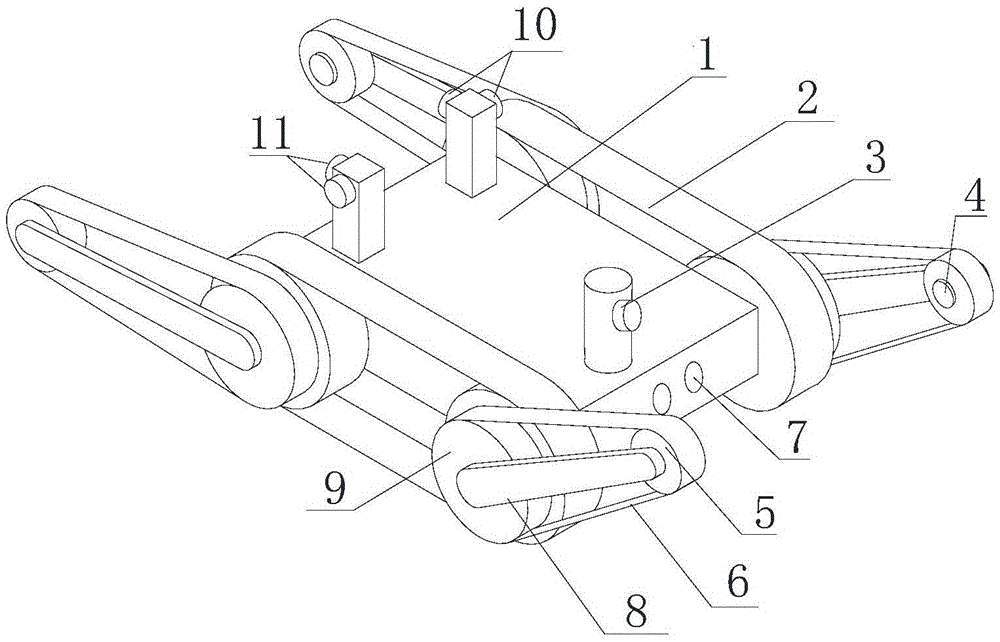
[0027] combined with Figures 1 to 2 The specific embodiments of the present invention are further described:
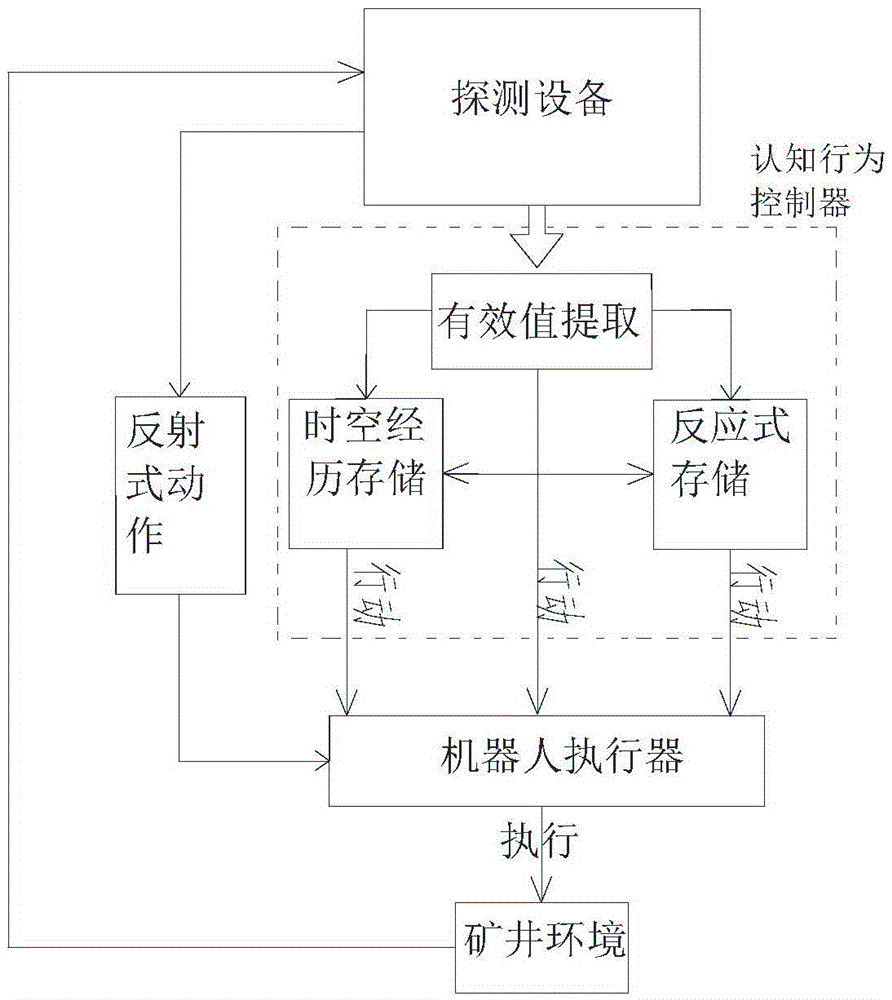
[0028] A coal mine search and rescue robot includes a robot actuator and a cognitive behavior controller. The robot actuator includes a robot body 1 and a detection device. The detection device is installed on the robot body, and a wheel set is installed on the side of the robot body. The detection device is connected to the cognitive behavior controller, and the cognitive behavior controller extracts the features detected by the detection device. The information is compared and processed, and the robot actuator actions are controlled according to the processing results.
[0029] There are four wheel sets, namely the front left wheel set, the front right wheel set, the rear left wheel set and the rear right wheel set. With 2 drive connections. The four wheel sets are respectively composed of a driving wheel 9 and a driven wheel 5. The driving wheel 9 and the drive...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More