Pneumatic flexible composite bionic mechanical hand
A pneumatic drive and manipulator technology, applied in the direction of manipulators, program-controlled manipulators, chucks, etc., can solve problems such as low reliability, low safety factor, and large noise, and achieve the effect of simplifying the structure and maximizing the efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] Below in conjunction with accompanying drawing and specific embodiment the present invention is described in further detail:
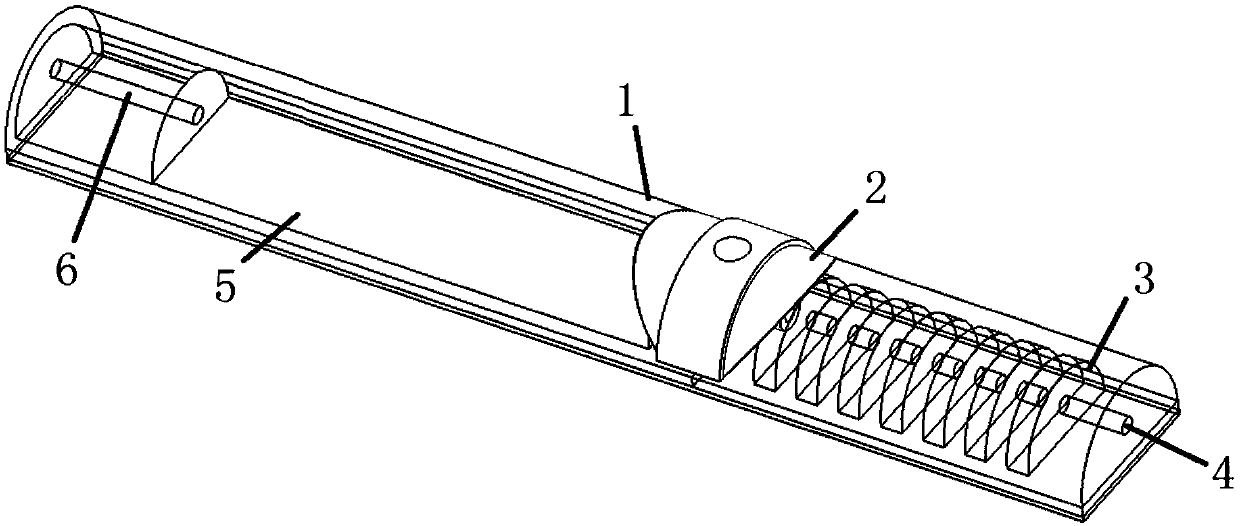
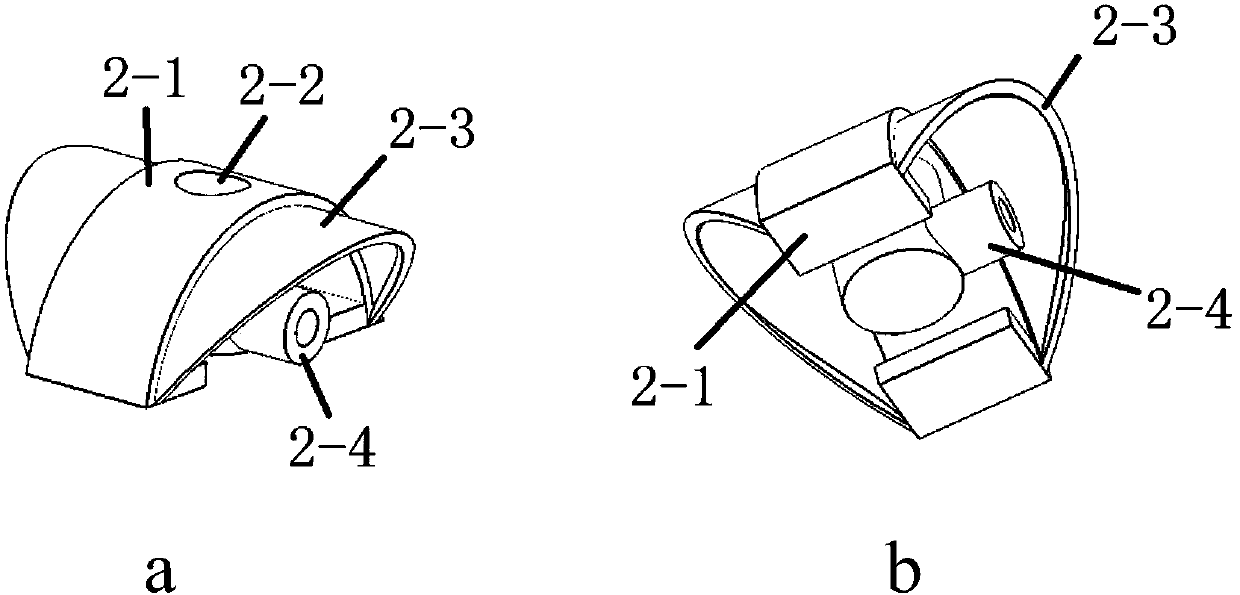
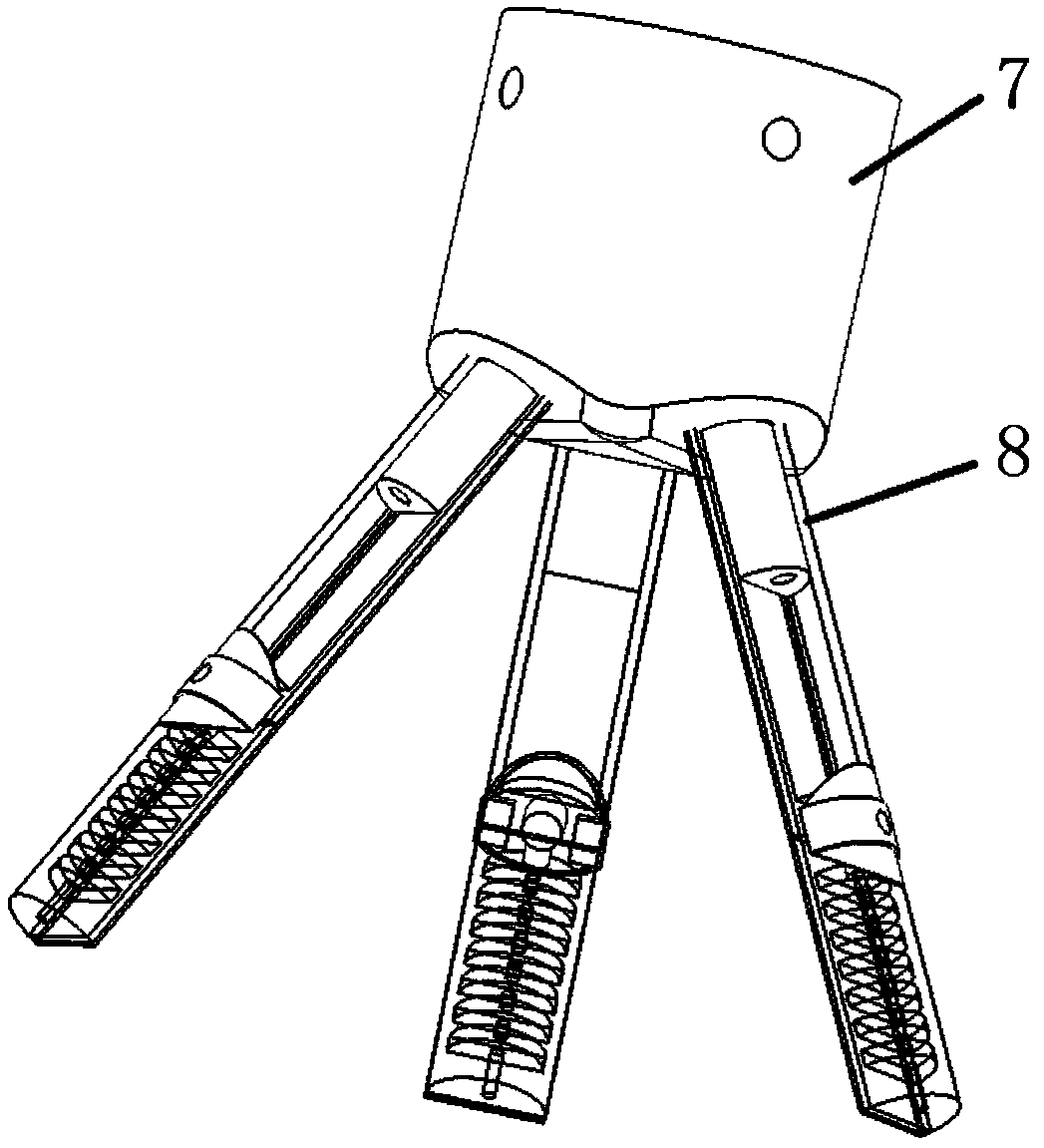
[0038] As shown in the figure, a pneumatic-driven soft and soft hybrid bionic manipulator is composed of a bionic finger 8 and a bionic palm 7; the bionic finger includes a base 1, a first air cavity 5, a first air cavity channel 6, and an inextensible layer, the second air cavity 3, the second air cavity channel 4 and the vent plug 2, wherein the cross-section of the base body is semicircular, and the first air cavity and the second air cavity are arranged inside the bionic finger, wherein the first air cavity is a single half Cylindrical cavity, the second air cavity is a compound semi-cylindrical cavity, a vent plug is set between the first air cavity and the second air cavity, the first air cavity communicates with the first air cavity channel, and the second air cavity channel runs through Composite semi-cylindrical cavity and communicated ...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Length | aaaaa | aaaaa |
| Height | aaaaa | aaaaa |
| Radius | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More