

Collision prediction method for three-figure grasper of space robot
A space robot and prediction method technology, which is applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of low efficiency of collision prediction methods, and achieve the effect of simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0079] Specific Embodiment 1: The collision prediction method of the three-finger gripper of the space robot in this embodiment is specifically prepared according to the following steps:
[0080] Step 1, modeling the three-finger grasping mechanism, including designing the three-dimensional model of the three-finger grasping mechanism of the space robot, and establishing a mathematical model according to the three-dimensional model;
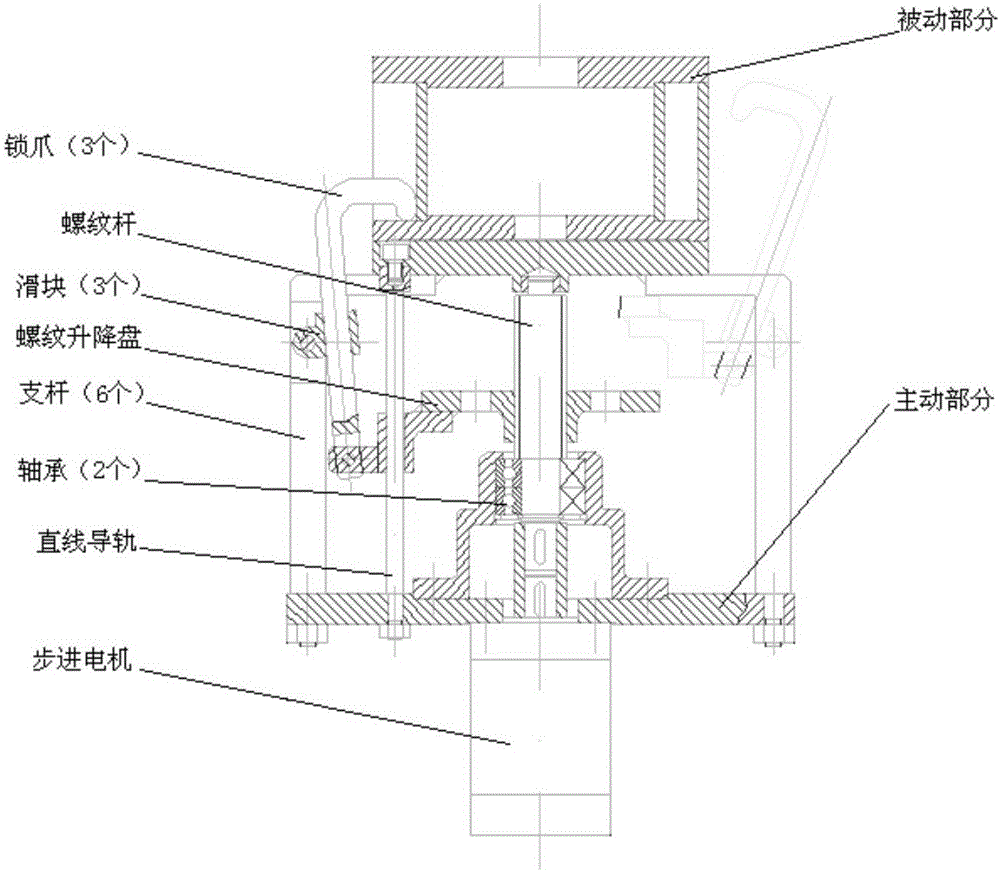
[0081] Among them, the three-finger grasping mechanism consists of two parts, the active part and the passive part, such as figure 1 As shown, the active part is installed at the end of the robotic arm of the service spacecraft as the end effector, and the passive part is installed on the replaceable module of the faulty satellite as a matcher of the robotic arm; the grasping process is shown in Figure 2(a) and Figure 2(b ); the three fingers in the three-finger grasping mechanism include No. 1 finger, No. 2 finger and No. 3 finger; No. 1 finger ...
specific Embodiment approach 2
[0127] Specific implementation mode two: the difference between this implementation mode and specific implementation mode one is: the specific steps of establishing a mathematical model according to the three-dimensional model described in step one are:
[0128] Step 11. Determine the size of the matching device mathematical model and the definition of the coordinate system, such as image 3 shown;
[0129] Step 12: Determine that the origin of the matcher coordinate system is at the geometric center of the matcher, that is, the center of mass. In the matcher coordinate system, the positive direction of the x-axis points to the apex of the No. 1 V-shaped groove, and the z-axis is perpendicular to the bottom surface of the No. 1 V-shaped groove. The y-axis forms a right-handed system;
[0130] Step 13, respectively determine the size, configuration and number of the three V-shaped grooves, the size, configuration and number of the matcher, and the distribution of the V-shaped ...
specific Embodiment approach 3
[0135] Embodiment 3: The difference between this embodiment and Embodiment 1 or 2 is that: the collision detection between the three fingers and the three V-shaped grooves in step 2 obtains the collision model of the three fingers and the three V-shaped grooves as follows: :
[0136] (1) Determine the position vectors of the three fingers in the inertial system respectively:
[0137] The position vectors of the three fingers in the inertial coordinate system are obtained by the end pose of the robot arm of the service spacecraft, the radius of the grasping domain, and the height of the tip of the three fingers from the inertial coordinate system at each moment during the grasping process, and the number 1 finger is taken as E.g Figure 5 shown;
[0138] The position of the grasping domain center of finger l in the inertial coordinate system is:
[0139]
[0140] in, is the description of the position vector of the end platform in the inertial system, is the descripti...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More