

Robot monocular guidance method and system for sorting scattered parts at random
A technology for robots and parts, applied in the field of robot monocular guidance methods and systems, can solve problems such as poor spatial positioning effect, poor reliability and stability, and poor versatility, and achieve the effect of improving efficiency and satisfying versatility.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Example Embodiment
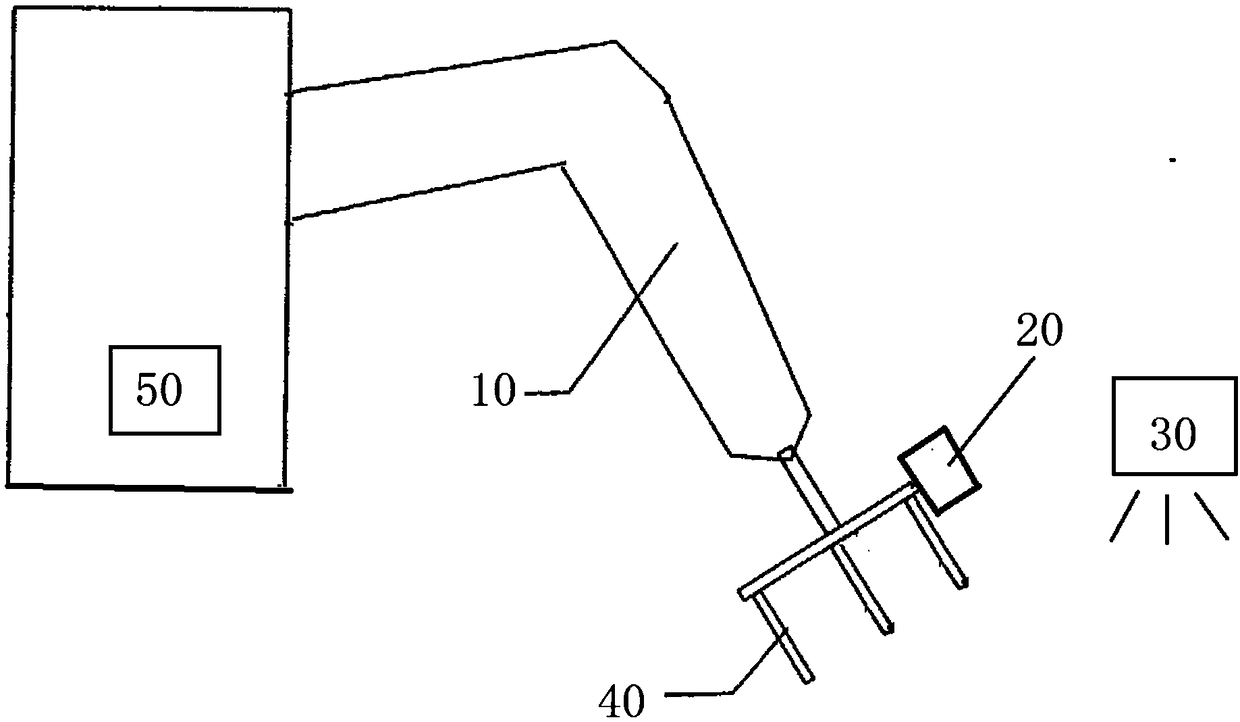
[0043] figure 1 It is a schematic diagram of a robot monocular guidance system for random sorting of scattered parts according to a preferred embodiment of the present invention.
[0044] like figure 1 As shown, the robot monocular guidance system for random sorting of scattered parts according to the preferred embodiment of the present invention includes: a robot 10 , a 2D camera 20 , a grasping part 40 and a control and processing device 50 . Preferably, a light source 30 is also generally included.
[0045] Wherein, the grasping part 40 is fixed at the end of the robotic arm of the robot 10 to form the end effector of the industrial robot; and the 2D camera 20 is fixed at the end of the robotic arm of the robot 10 .
[0046] Preferably, the light source is a ring light source.
[0047]Preferably, the gripping member is an electric gripper. For example, the gripping part is fastened to the end of the robot by means of a flange.
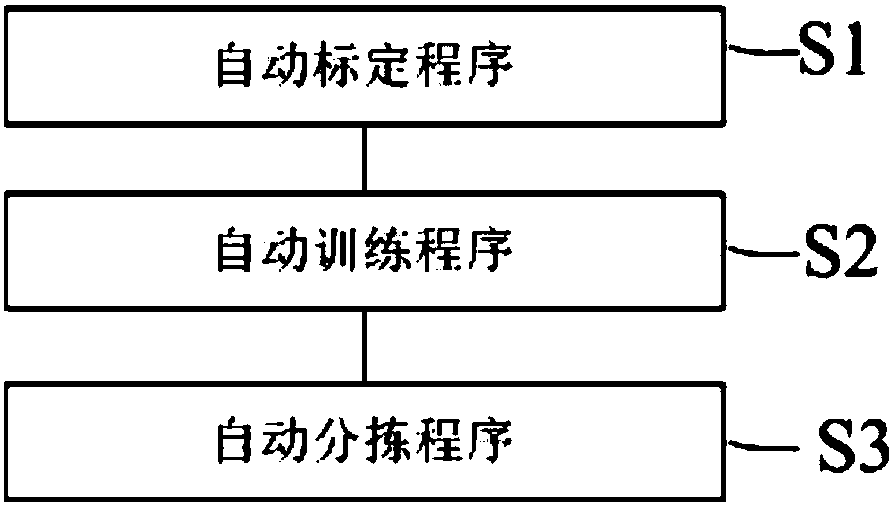
[0048] figure 2 It is a flow chart of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More